
Номер по Госреестру СИ: 51227-12
51227-12 Системы диагностические
(СК-Э)
Назначение средства измерений:
Системы диагностические СК-Э (далее - системы) предназначены для измерений геометрических параметров Устройств для восстановления величины зацепления телескопических соединений трактов (далее - ТСТ) ИТЦЯ.301532.028 (далее - Устройств) и ТСТ, а также телевизионного визуального контроля за процессом монтажа Устройств и состояния ТСТ реактора большой мощности канального (РБМК) с наружной стороны (из реакторного пространства (далее - РП)) с установленными Устройствами и без них.


Внешний вид.
Системы диагностические
Рисунок № 1
Общие сведения
Дата публикации - 07.05.2020
Срок свидетельства - 13.09.2017
Номер записи - 140808
ID в реестре СИ - 363208
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Модификации СИ
нет данных,
Производитель
Изготовитель - ЗАО "Диаконт"
Страна - РОССИЯ
Населенный пункт - г.С.-Петербург
Уведомление о начале осуществления предпринимательской деятельности - Да
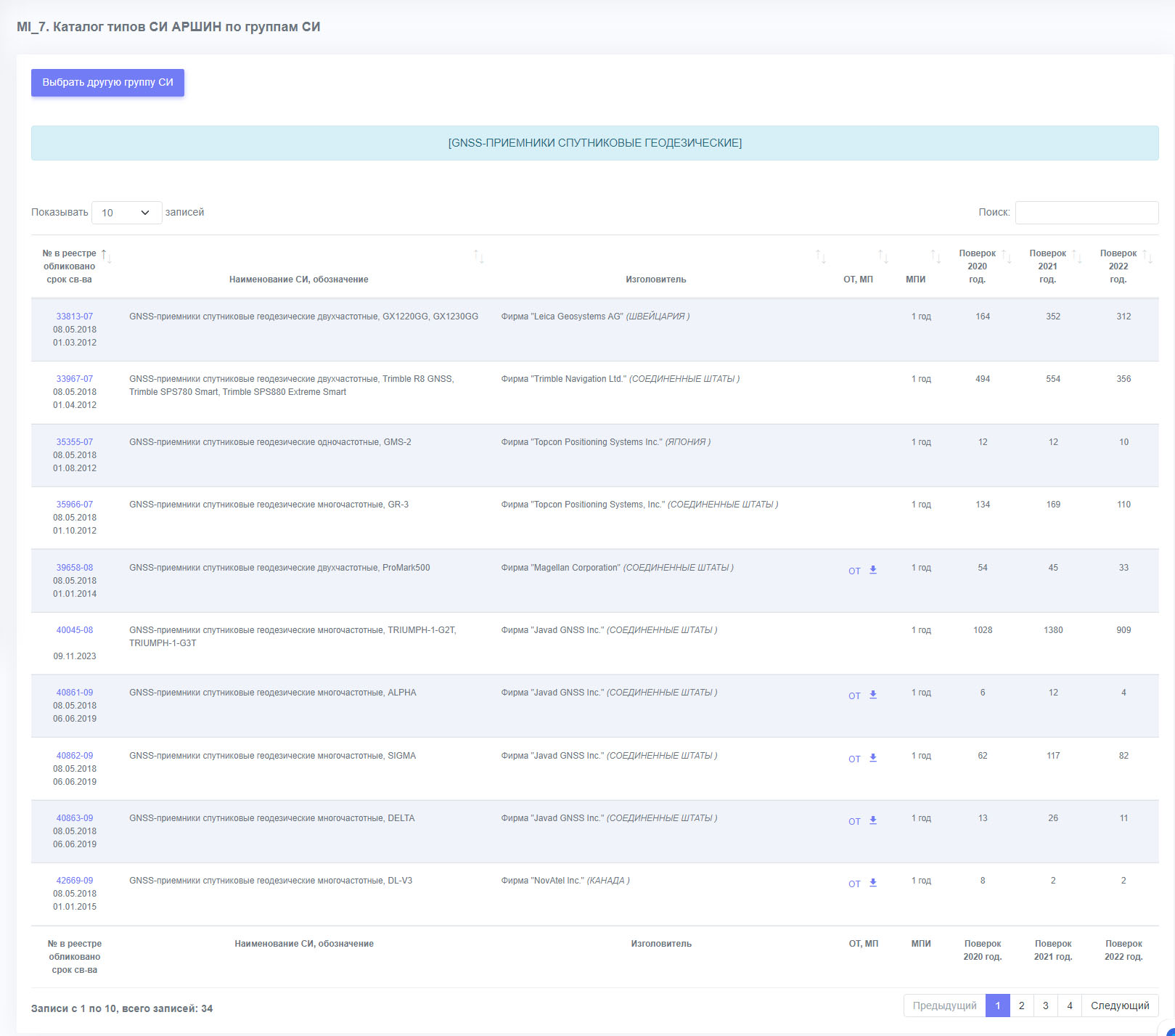
Каталог СИ, используемый в сервисе ОЕИ-Аналитика имеет трехуровневую структуру вида: области измерений (более 20), разделы областей измерений (более 250) и группы СИ (более 10 тыс.). При разработке каталога были использованы как существующие кодификаторы: МИ 2803-2014, МИ 2314-2006, МИ 2314-2022, так и собственные наработки. Перед применением каталог был адаптирован и обогащен данными из реального реестра, утвержденных типов СИ ФГИС АРШИН.
Отчет «Каталог типов СИ АРШИН по группам СИ» сортирует типы СИ в зависимости от выбранной группы СИ (можно выбрать нескольких групп СИ одновременно) и представляет их списком в виде удобной для дальнейшей работы таблицы. Таблица обладает функциями поиска и сортировки по любой из колонок. К группам СИ отнесены устойчивые словосочетания наименований типов СИ, состоящие максимум из 3 слов.
Таблица содержит минимум 8 колонок:
По каждому типу СИ приведены: номер в гос. реестре с ссылкой, наименование типа СИ, наименование фирмы-производителя, ссылка на описание типа и методику поверки (если они имеются), величина интервала между поверками, а также, количество поверок по годам (начиная с 2020).
Статистика
Кол-во поверок - 2
Выдано извещений - 0
Кол-во периодических поверок - 0
Кол-во средств измерений - 0
Кол-во владельцев - 1
Усредненный год выпуска СИ - 0
МПИ по поверкам - 365 дн.
Приказы РСТ, где упоминается данный тип СИ
Наличие аналогов СИ: Системы диагностические (СК-Э)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений ЗАО "Диаконт"
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
28658-05 01.03.2010 |
Комплексы телеуправляемые диагностические, ТДК ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
1 год | |
|
40800-09 01.07.2014 |
Каналы измерительные электрической части систем автоматического регулирования и защиты, ЭЧ САРЗ ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
42422-09 01.01.2015 |
Системы диагностики коррозионного состояния трубопроводов АЭС, СДКТ-АЭС ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
43468-09 |
Установка телевизионная, АСК 837.00.00.000 "Аркус-Т" ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
44107-10 01.04.2015 |
Комплексы телеуправляемые диагностические, ТДК-ТСТ-М ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
46431-11 04.03.2016 |
Комплексы телеуправляемые диагностические, ТДК ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
49937-12 18.05.2017 |
Стенды измерительные, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
51227-12 13.09.2017 |
Системы диагностические, СК-Э ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
51924-12 27.11.2017 |
Системы для измерения пространственного искривления технологических каналов и каналов системы управления и защиты, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
53459-13 |
Каналы контроля усилий, перемещений и уровня системы управления машины перегрузочной МПС-В-1200, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
2 года |
|
53460-13 14.05.2018 |
Системы измерения размера "К" дистанционные, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
53461-13 27.04.2024 |
Системы диагностические модернизированные, СК-Э-М ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
53462-13 14.05.2018 |
Системы измерения зазора между кожухом реактора и графитовой кладкой дистанционные, СК-Э(КЖ) ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
53789-13 |
Комплекс программно-технический информационно-вычислительной системы (ПТК ИВС), Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
2 года |
|
54643-13 23.08.2018 |
Комплексы телевизионного контроля графитовых колонн, КТК-ГК ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
55179-13 10.10.2018 |
Каналы измерительные электрических частей электрогидравлической системы регулирования, электронного автомата безопасности и подсистемы сбора информации, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
2 года |
|
55345-13 30.08.2024 |
Системы диагностические модернизированные, СК-Э-ММ ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
55651-13 28.11.2018 |
Системы для измерения пространственного искривления технологических каналов и каналов системы управления и защиты модернизированные, СИПИ-М ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
1 год |
|
56295-14 |
Каналы контроля усилий, перемещений и уровня системы управления машины перегрузочной (СУМП) для реакторов ВВЭР-1200, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
2 года |
|
57642-14 |
Каналы измерительные блока управления импульсными предохранительными клапанами, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ |
2 года |
|
59805-15 06.02.2020 |
Комплексы телевизионного контроля графитовых колонн модернизированные, КТК-ГК-М ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ МП |
1 год |
|
59956-15 |
Каналы измерительные системы автоматического управления дизель-генераторными установками (САУ ДГ), Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ МП |
2 года |
|
61056-15 14.07.2021 |
Системы телевизионного контроля, СТК-ТСТ ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ МП |
1 год |
|
62530-15 30.11.2020 |
Каналы измерительные № 2 четырехканальные телеуправляемых диагностических комплексов, ТДК-400-М-Л ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ МП |
1 год |
|
62987-16 21.01.2021 |
Каналы измерительные электрической части систем автоматического регулирования и защиты, Нет данных ЗАО "Диаконт" (РОССИЯ г.С.-Петербург) |
ОТ МП |
2 года |
Каталог СИ, используемый в сервисе ОЕИ-Аналитика имеет трехуровневую структуру вида: области измерений (более 20), разделы областей измерений (более 250) и группы СИ (более 10 тыс.). При разработке каталога были использованы как существующие кодификаторы: МИ 2803-2014, МИ 2314-2006, МИ 2314-2022, так и собственные наработки. Перед применением каталог был адаптирован и обогащен данными из реального реестра, утвержденных типов СИ ФГИС АРШИН.
Отчет «Каталог типов СИ АРШИН по группам СИ» сортирует типы СИ в зависимости от выбранной группы СИ (можно выбрать нескольких групп СИ одновременно) и представляет их списком в виде удобной для дальнейшей работы таблицы. Таблица обладает функциями поиска и сортировки по любой из колонок. К группам СИ отнесены устойчивые словосочетания наименований типов СИ, состоящие максимум из 3 слов.
Таблица содержит минимум 8 колонок:
По каждому типу СИ приведены: номер в гос. реестре с ссылкой, наименование типа СИ, наименование фирмы-производителя, ссылка на описание типа и методику поверки (если они имеются), величина интервала между поверками, а также, количество поверок по годам (начиная с 2020).
Кто поверяет Системы диагностические (СК-Э)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2025 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ФБУ «Тюменский ЦСМ» (RA.RU.311494) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 |
Стоимость поверки Системы диагностические (СК-Э)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|
Программное обеспечение
Системы работают с автономным программным обеспечением TCT Observer v.1.0.0 (далее - ПО). ПО обеспечивает идентификацию, обработку, регистрацию, ведение архива результатов измерений, оформление протоколов. К метрологически значимой части ПО средства измерений относятся файлы TSTCore.dll, TSTGUIManager.dll, TSTObserverApp.exe.
Таблица 1
|
Наименование программного обеспечения |
Идентификационное наименование программного обеспечения |
Номер версии (идентификационный номер) программного обеспече ния |
Цифровой идентификатор программного обеспечения (контрольная сумма исполняемого кода) |
Алгоритм вычисления цифрового идентификатора программного обеспечения |
|
TCT Ob server |
TSTCore.dll TSTGUIManager.dll TSTObserverApp.exe |
1.0.0 |
45a52885a7b2db5514a65da12e113e53 bb141cec219cd2151cef3a9547225115 f2507fc14a226d147eea8791cb14d8fb |
MD5 |
ПО не предусматривает возможность доступа в настройки, для этого необходим уникальный программный код, имеющийся только у предприятия-изготовителя.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню «С» по МИ 3286-2010.
Знак утверждения типа
Знак утверждения типаЗнак утверждения типа наносится корпус блока управления БУ-РТК-Н методом шелко-графии, а также на титульные листы руководств по эксплуатации типографским способом.
Сведения о методиках измерений
Сведения о методиках (методах) измерений
приведены в документе «Системы диагностические СК-Э. Руководство по эксплуатации. ИТ-ЦЯ.424321.002 РЭ». 2011 г.
Нормативные и технические документы
Нормативные и технические документы, устанавливающие требования к системам диагностическим СК-Э«Системы диагностические СК-Э. Технические условия. ИТЦЯ.424321.002 ТУ»
Поверка
Поверкаосуществляется по документу «Системы диагностические СК-Э. Методика поверки. МП 25120001-2012», утвержденному ГЦИ СИ ФГУП «ВНИИМ им. Д.И. Менделеева» в январе 2012 г.
Основные средства поверки - меры длины концевые плоскопараллельные эталонные 4 разряда по МИ 2060-90, линейка измерительная металлическая диапазон измерений (0-500) мм по ГОСТ 427-75.
Изготовитель
Закрытое акционерное общество «Диаконт»Юридический адрес: 198903, г. Санкт-Петербург, Петродворец, Ропшинское шоссе, д. 4
Почтовый адрес: 195274, г. Санкт-Петербург, ул. Учительская, д. 2 Телефон: (812) - 334-00-81, 592-62-35
Факс: (812) - 592-62-65
E-mail: diakont@diakont.com
http://www.diakont.ru
Испытательный центр
ГЦИ СИ ФГУП «ВНИИМ им. Д. И. Менделеева», зарегистрирован в Государственном реестре под № 30001-10Адрес: 190005, г. Санкт-Петербург, Московский пр., 19
Тел.: (812) 251-76-01
Факс: (812) 713-01-14
Е-mail: info@vniim.ru
Принцип работы системы основан на анализе телевизионного изображения или массива элементов разложения телевизионного сигнала (МЭР). Система обеспечивает возможность измерения линейных размеров контролируемых объектов путем сопоставления их телевизионного изображения с телевизионным изображением опорного размера. Опорный размер формируется проецированием параллельных лазерных линий.
Системы включают в себя следующие группы оборудования, разделяемые по функциональному назначению:
-
- загрузочное устройство УЗ-РТК-Н (далее - УЗ-РТК-Н);
-
- оборудование передающей части (робот-контролер и робот поддержки);
-
- оборудование приемной части (блок управления БУ-РТК-Н, системный блок архивирующего и управляющего компьютера БСКАУ-ТСТ-О, 3D манипуляторы, мониторы, клавиатура, блок цифровых клавиш, мышь, источник бесперебойного питания, сетевой фильтр).
УЗ-РТК-Н предназначено для доставки роботов в РП (для проведения измерений) и обратно, контроля за провисанием кабелей, подключенных к роботам. УЗ-РТК-Н состоит из:
-
- загрузочной платформы, предназначенной для погрузки роботов;
-
- штанги, предназначенной для крепления составных частей УЗ-РТК-Н;
-
- камеры телевизионной КТ-РТК-З, предназначенной для контроля за погрузкой и выгрузкой роботов и контроля за провисанием кабелей, подключенных к роботам;
-
- камеры телевизионной осмотра потолка КТОП-РТК-Н, предназначенной для осмотра потолка при прижатии загрузочной платформы к нижней поверхности;
-
- блока осветителей, предназначенного для обеспечения необходимого уровня освещения;
-
- блока микропереключателей, предназначенного для контроля прижатия загрузочной платформы к нижней поверхности с целью загрузки и выгрузки роботов;
-
- роликов, предназначенных для направления линии связи;
-
- рым-болта, предназначенного для доставки УЗ-РТК-Н к месту эксплуатации;
-
- упора, предназначенного для крепления УЗ-РТК-Н на месте эксплуатации.
Робот-контролер предназначен для измерений эксплуатационных параметров Устройств и выполнения телевизионного визуального контроля. Робот-контролер состоит из:
-
- шасси (оснащено четырьмя ходовыми камерами для переднего и заднего обзора при перемещении), предназначенного для доставки оборудования к месту проведения измерений и контроля;
-
- камеры контроля величины зацепления (оснащена двумя лазерами для задания контрольного размера при измерениях и двумя осветителями), предназначенной для измерений расстояния между началом конусного перехода на больший диаметр на верхнем тракте ТСТ и верхним торцом Устройства (в случае отсутствия Устройства - торцом нижней трубы);
-
- блока камер контроля эксплуатационных параметров Устройства (камера контроля раскрытия Устройства и камера контроля сползания Устройства), предназначенных для измерений расстояния между верхним торцом фланца в сборе и торцом Устройства и зазора между зажимными планками Устройства сверху и снизу;
- привода камер опускаемых, предназначенного для подъема и опускания блока камер контроля эксплуатационных параметров Устройства;
- датчика камер опускаемых, предназначенного для формирования сигнала о высоте подъема и опускания блока камер контроля эксплуатационных параметров Устройства;
- привода наклона камеры, предназначенного для наклона камеры контроля величины зацепления;
- датчика наклона камеры, предназначенного для формирования сигнала об угле наклона камеры контроля величины зацепления.
Робот поддержки предназначен для поддержки кабельной линии робота-контролера при его маневрировании в РП и контроля провисания кабелей для предотвращения их повреждений. Робот поддержки состоит из:
- шасси (оснащено четырьмя ходовыми камерами для переднего и заднего обзора при перемещении и двумя обзорными камерами для контроля провисания кабелей), предназначенного для перемещений робота поддержки;
- узла приводов протяжки кабеля , предназначенного для поддержки кабельной линии робота-контролера;
- блока осветителей робота поддержки БО-РП-ВРК, предназначенного для обеспечения необходимого уровня освещенности.
В комплект системы также входят: кабельная линия питания и связи, комплект запасных частей.
Внешний вид системы представлен на рисунке 1.
а) б) в)
Рисунок 1 - Внешний вид системы диагностической СК-Э
а) робот поддержки, б) робот-контролер, в) загрузочное устройство
Комплектность систем приведена в таблице 4.
Таблица 4
|
№ п/п |
Наименование |
Кол-во, шт. |
|
1 |
Устройство загрузочное УЗ-РТК-Н |
1 |
|
2 |
Робот-контролер |
1 |
|
3 |
Робот поддержки |
1 |
|
4 |
Блок управления БУ-РТК-Н |
1 |
|
5 |
Блок системный компьютера архивирующего и управляющего БСКАУ-ТСТ-О |
1 |
|
6 |
3D манипулятор |
4 |
|
7 |
Монитор 24" |
2 |
|
8 |
Клавиатура |
1 |
|
9 |
Блок цифровых клавиш |
1 |
|
10 |
Мышь |
1 |
|
11 |
Источник бесперебойного питания |
1 |
|
12 |
Фильтр сетевой |
1 |
|
13 |
Кабельная линия питания и связи |
1 |
|
14 |
Программный комплекс «TCT Observer v.1.0.0» на компакт-диске |
1 |
|
16 |
Комплект запасных частей |
1 |
|
17 |
Руководство по эксплуатации |
1 |
|
18 |
Методика поверки |
1 |
1) Диапазон измерений размеров и пределы допускаемой абсолютной погрешности измерений приведены в таблице 2.
Таблица 2
|
Наименование характеристики, единицы измерений |
Значение характеристики |
|
Диапазон измерений расстояния между началом конусного перехода на больший диаметр на верхнем тракте ТСТ и верхним торцом Устройства (в случае отсутствия Устройства - торцом нижней трубы), мм |
от 3 до 400 |
|
Пределы допускаемой абсолютной погрешности измерений расстояния между началом конусного перехода на больший диаметр на верхнем тракте ТСТ и верхним торцом Устройства (в случае отсутствия Устройства - торцом нижней трубы), мм |
в режиме высокой точности ±2 в режиме нормальной точности ±3 |
|
Диапазон измерений расстояния между верхним торцом фланца в сборе и торцом Устройства, мм |
от 0,3 до 5,0 (диапазон показаний - от 0 до 5,0) |
|
Пределы допускаемой абсолютной погрешности измерений расстояния между верхним торцом фланца в сборе и торцом Устройства, мм |
± 0,3 |
|
Диапазон измерений зазора между зажимными планками Устройства сверху и снизу, мм |
от 2 до 10 |
|
Пределы допускаемой абсолютной погрешности измерений зазора между зажимными планками Устройства сверху и снизу, мм |
± 0,5 |
2) Масса и габаритные размеры приведены в таблице 3.
Таблица 3
|
Наименование изделия (составной части) |
Габаритные размеры, мм, не более |
Масса, кг, не более |
|
Загрузочное устройство УЗ-РТК-Н |
550x260x11000 |
100 |
|
Робот-контролер |
160x100x500 |
7 |
|
Робот поддержки |
180x100x200 |
6 |
-
3) Параметры электропитания
Питание системы осуществляется от однофазной сети переменного тока с напряжением 220 -+3223 В и частотой (50±1) Гц с глухо-заземленной нейтралью.
Мощность, потребляемая системой, составляет не более 1,2 кВт.
-
4) Условия окружающей среды во время эксплуатации
Для оборудования передающей части системы (внутри реакторного пространства):
-
- диапазон рабочей температуры окружающего воздуха от плюс 20 до плюс 50 °С;
-
- относительная влажность окружающего воздуха при температуре плюс 25°С не более 85 %;
-
- диапазон атмосферного давления от 86,6 до 106,7 кПа;
-
- интегральная доза гамма-излучения не более 104 рад;
-
- мощность дозы гамма-излучения не более 102 рад/ч.
Для оборудования приемной части системы:
-
- диапазон рабочей температуры окружающего воздуха от плюс 20 до плюс 35 °С;
-
- относительная влажность окружающего воздуха при температуре плюс 25 °С не более 80 %;
-
- диапазон атмосферного давления от 86,6 до 106,7 кПа.
-
5) Срок службы системы составляет не менее 5 лет с учетом проведения предупредительного ремонта и замены ресурсных компонентов.
-
6) Средняя загрузка 192 ч в год.