
Номер по Госреестру СИ: 48900-12
48900-12 Система ультразвукового контроля
(СОНОТРОН™ - ЕМАТ 880)

Внешний вид.
Система ультразвукового контроля
Рисунок № 1
Внешний вид.
Система ультразвукового контроля
Рисунок № 2
Общие сведения
Дата публикации - 08.05.2018
Срок свидетельства -
Номер записи - 138049
ID в реестре СИ - 360449
Тип производства - единичное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Модификации СИ
СОНОТРОН™ - ЕМАТ 880, Нет модификации, нет данных,
Производитель
Изготовитель - Фирма "NDT Technologies Inc."
Страна - КАНАДА
Населенный пункт -
Уведомление о начале осуществления предпринимательской деятельности - Да
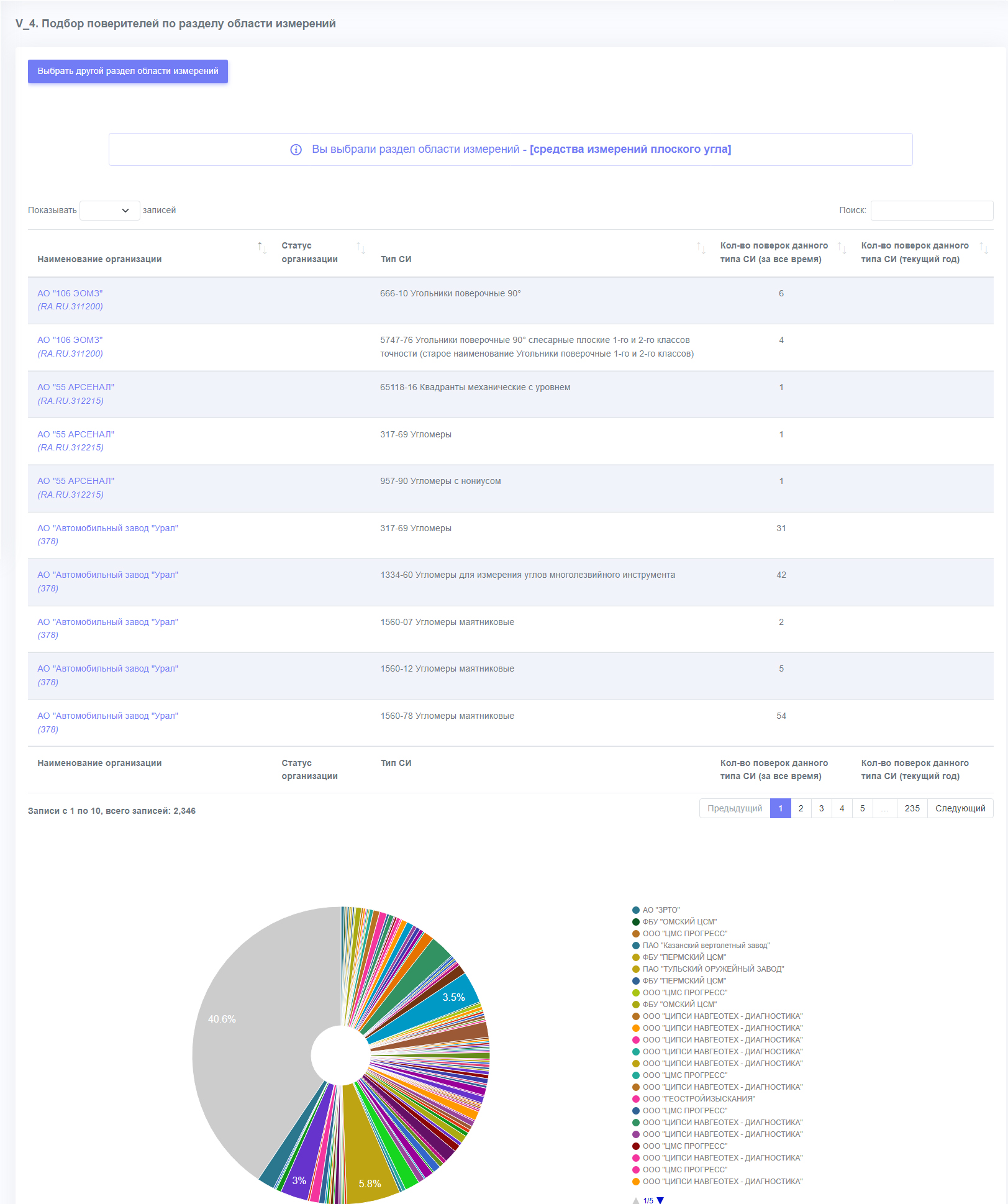
"Подбор поверителей по разделу области измерений" позволяет быстро найти организации, специализирующиеся поверкой СИ в конкретном разделе области измерений. Более 200 подразделов из 19 областей измерений.
Для запуска отчета достаточно выбрать из списка интересующий раздел области измерений и нажать кнопку "Показать результат".
В результатах поиска будет отображена таблица, содержащая информацию об организациях, проводивших поверку, их статус (подвед РСТ или нет), модификации типов СИ, общее количество поверок и количество поверок, сделанных в текущем году.
Статистика
Кол-во поверок - 9
Выдано извещений - 0
Кол-во периодических поверок - 1
Кол-во средств измерений - 2
Кол-во владельцев - 2
Усредненный год выпуска СИ - 0
МПИ по поверкам - 365 дн.
Приказы РСТ, где упоминается данный тип СИ
Наличие аналогов СИ: Система ультразвукового контроля (СОНОТРОН™ - ЕМАТ 880)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений Фирма "NDT Technologies Inc."
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
47186-11 |
Система контроля вихревым током, ЭДДИТРОН™ Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
48900-12 |
Система ультразвукового контроля, СОНОТРОН™ - ЕМАТ 880 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
49403-12 |
Система контроля вихревым током, ЭДДИТРОН™ Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
49567-12 |
Система ультразвукового контроля, СОНОТРОН™-ЕМАТ 880 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
55273-13 |
Система контроля вихревым током, ЭДДИТРОН™ Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
55552-13 |
Система ультразвукового контроля, SONOTRON™/24 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
56612-14 |
Система ультразвукового контроля, SONOTRON™/24 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
58415-14 |
Твердомер, NDT-Р-400 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
58673-14 |
Станция автоматизированного ультразвукового контроля цельнокатаных колес, NDT-UMS280 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ |
1 год |
|
60259-15 01.04.2020 |
Системы ультразвукового контроля, SONOTRON™ - ЕМАТ 880 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ МП |
1 год |
|
60369-15 01.04.2020 |
Меры моделей дефектов, SOPR-NDT-02 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ МП |
2 года |
|
60370-15 01.04.2020 |
Системы контроля вихревым током, ЭДДИТРОН™ Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ МП |
1 год |
|
60375-15 01.04.2020 |
Системы ультразвукового контроля, SONOTRON™/24 Фирма "NDT Technologies Inc." (КАНАДА ) |
ОТ МП |
1 год |
Город Омск был основан в 1716 году. Официально получил статус города в 1782 году. С 1934 года - административный центр Омской области. Площадь Омска составляет 566,9 кв. км. Территория города разделена на пять административных округов: Центральный, Советский, Кировский, Ленинский, Октябрьский. Протяженность города Омска вдоль реки Иртыш составляет около 40 км.
Расстояние от Омска до Москвы составляет 2 555 км. Климат Омска резко континентальный. Зима суровая, продолжительная, с устойчивым снежным покровом. Лето теплое, часто жаркое. Весна и осень характеризуются резкими колебаниями температуры. Средняя температура самого теплого месяца (июля): +18˚С. Средняя температура самого холодного месяца (январь): -19˚С.
Численность населения на 1 января 2022 года составляет 1 126 193 человека. Плотность населения составляет 1 949 человек на 1 кв. км. Омск - один из крупнейших городов Западно-Сибирского региона России. Омская область соседствует с Тюменской областью на западе и севере, с Томской и Новосибирской областями на востоке и с Республикой Казахстан на юге и юго-западе.
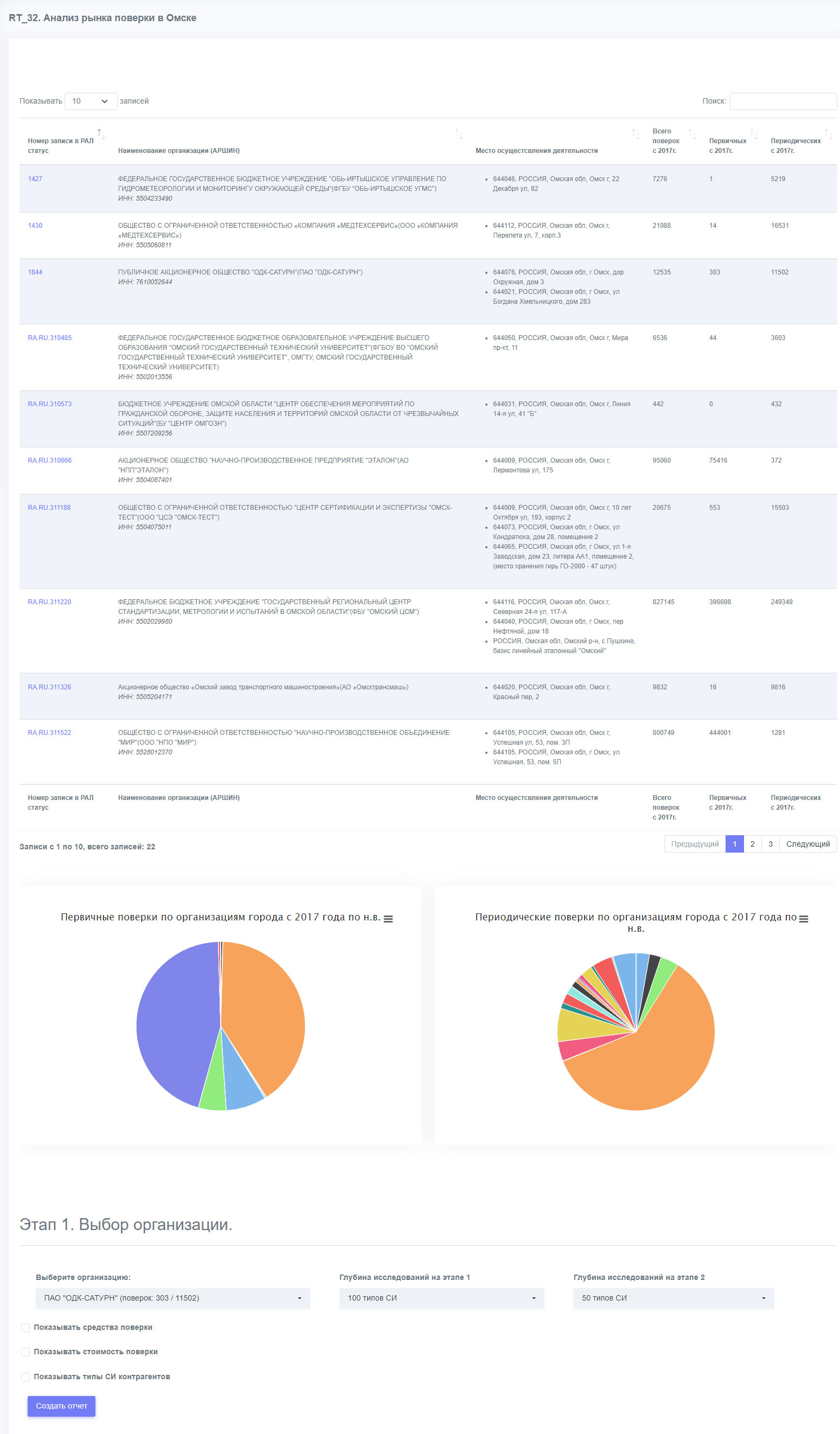
Отчет "Анализ рынка поверки в Омске" предоставляет исчерпывающую информацию по деятельности организаций, аккредитованных в Национальной системе аккредитации на право поверки средств измерений в городе Омск.
При проведении исследований были введены следующие ограничения:
- в отчете присутствуют организации с первичными или периодическими поверками от 100 шт. с 2017 года и действующими аттестатами аккредитации на текущий год;
- на первом и втором этапах фильтром отсекаются типы СИ с менее чем 10 поверками в год на организацию;
- на первом и втором этапах фильтром отсекаются типы СИ с менее чем 10 поверками в год на организацию;
- место регистрации или осуществления деятельности организаций должно совпадать с выбранным городом;
- топ типов СИ ограничен 500 позициями по каждой организации (сортировка по убыванию количества поверок);
- топ типов СИ ограничен 100 позициями по каждой организации при поиске по видам измерений (сортировка по убыванию количества поверок).
Содержание отчета:
- Список организаций-поверителей, осуществляющих поверку в городе Москва по данным ФСА и ФГИС АРШИН.
- Объемы первичных и периодических поверок за период с 2017г. по н.в.
- Информация о местах осуществления деятельности организаций-поверителей.
- Доля рынка поверок в % среди всех организаций, исследуемого города (предоставление информации в графическом и табличном видах).
- Детальный анализ по каждой из организации, работающей в выбранном городе.
- Анализ деятельности в разрезе первичных, периодических поверок и видов измерений.
- Количество поверок по типам СИ в динамике по годам.
- Индикация импортных аналогов средств поверки (в соответствии с ПЕРЕЧЕНЕМ СИ ОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА, АНАЛОГИЧНЫХ СРЕДСТВАМ ИЗМЕРЕНИЙ ИМПОРТНОГО ПРОИЗВОДСТВА от 09.2022г)
- Индикация типов СИ по ПП РФ №250 от 20.04.2010 г.
- Быстрый анализ контрагентов организаций-поверителей.
- Анализ цен на поверку СИ по Фед. округу.
Кто поверяет Система ультразвукового контроля (СОНОТРОН™ - ЕМАТ 880)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2025 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ФБУ "КЕМЕРОВСКИЙ ЦСМ" (30063-12) | РСТ | 1 | 0 | 1 | 0 | 1 | 0 | 1 | ||
| ФБУ "КЕМЕРОВСКИЙ ЦСМ" (RA.RU.311469) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Кемеровский ЦСМ» (72) | РСТ | 6 | 0 | 0 | 0 | 0 | 0 | 0 |
Стоимость поверки Система ультразвукового контроля (СОНОТРОН™ - ЕМАТ 880)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|---|---|
|
ФБУ Кузбасский ЦСМ Кемеровская область |
6733 | 7072 |
|
ФБУ Красноярский ЦСМ Красноярский край |
7416 | 7072 |
|
ФБУ Омский ЦСМ Омская область |
6733 | 7072 |
|
ФБУ Томский ЦСМ Томская область |
7407 | 7072 |
Программное обеспечение
Программное обеспечение (ПО), входящее в состав системы СОНОТРОН тм, выполняет функции отображения на экране персонального компьютера информации в удобном для оператора виде, а также задания условий измерения. На персональном компьютере установлена операционная система QNX.
Защита ПО от преднамеренных и непреднамеренных воздействий соответствует уровню «С» по МИ 3286-2010.
Идентификационные данные ПО приведены в таблице 1.
Таблица 1.
|
Наименование программного обеспечения |
Идентификаци онное наименование программного обеспечения |
Номер версии (идентификаци онный номер) программного обеспечения |
Цифровой идентификатор программного обеспечения (контрольная сумма исполняемого кода) |
Алгоритм вычисления цифрового идентификатор а программного обеспечения |
|
ПО контроля |
Sonotron- 880 MS |
1.50 |
---* |
— |
|
ПО контроля |
Sonotron - 880 DACQ |
1.170 |
---* |
— |
* Оператору доступен только ограниченный пользовательский режим работы в операционной системе QNX. Доступ к файловой системе имеют лишь сервисные инженеры фирмы-производителя.
Знак утверждения типа
Сведения о методиках измерений
Сведения о методиках (методах) измеренийИспользуются для прямых измерений в соответствии с методикой, изложенной в руководстве по эксплуатации «Система контроля вихревым током ЭДДИТРОН ТМ. Руководство по эксплуатации».
Нормативные и технические документы
Нормативные и технические документы, устанавливающие требования к системе ультразвукового контроля СОНОТРОН тм - ЕМАТ 880
Техническая документация фирмы NDT Technologies Inc. (Канада).
Поверка
Поверкаосуществляется в соответствии с методикой поверки «Система ультразвукового контроля СОНОТРОН тм - ЕМАТ 880. Методика поверки» МП 50.Д4-11, утвержденная ГЦИ СИ ФГУП «ВНИИОФИ» в ноябре 2011 г.
Основные средства поверки:
-
1. Осциллограф С1-103, полоса пропускания от 0 до 10 МГц, погрешность коэффициентов отклонения 4%;
-
2. Комплект мер моделей дефектов СО5, номинальное значение ширины МД и его отклонение (0,5±0,1) мм, номинальные значения глубины МД и их отклонения (1,0±0,1) мм и (1,5±0,1) мм, номинальные значения длины МД и их отклонения (20,0±0,5) мм и (10,0±0,5) мм.
Изготовитель
фирма NDT Technologies Inc., Канада
Адрес: 20275 Clark Graham, Baie D' Urfe - Montreal, Quebec - Canada
Телефон: +1-514-457-7650, факс +1-514-547-7652
Электронная no4Ta:info@ndt.ca Сайт: http://ndt.ca
Лист № 5 Всего листов 5
Заявитель
Открытое акционерное общество «ЕВРАЗ Объединенный Западно-Сибирский металлургический комбинат» (ОАО "ЕВРАЗ ЗСМК")
Адрес: 654043, Россия, Кемеровская область, г. Новокузнецк.
Телефон: (3843) 595-900, факс (3843) 59-43-43
Электронная почта: zsmk@zsmk.ru
Сайт: http://www.zsmk.ru
Испытательный центр
Государственный центр испытаний средств измерений федерального государственного унитарного предприятия «Всероссийский научно-исследовательский институт оптикофизических измерений» (ГЦИ СИ ФГУП «ВНИИОФИ»), аттестат аккредитации
(Госреестр № 30003-08) от 30.12.2008.
Адрес: 119361, г. Москва, ул. Озерная, 46.
Телефон: (495) 437-56-33, факс: (495) 437-31-47
E-mail: vniiofi@vniiofi.ru
Принцип действия системы основан на зеркально-теневом методе ультразвукового контроля. В качестве метода возбуждения и приема ультразвуковых колебаний применяется бесконтактный электромагнитно-акустический (ЭМА) метод, что уменьшает влияние окалины и других загрязнений поверхности рельса на результаты контроля. Данный метод основан на эффекте преобразования высокочастотных электромагнитных колебаний в акустические колебания (и наоборот) поверхностью металла в постоянном магнитном поле.
При пропускании через обмотку электромагнитно-акустических преобразователей (ЭМАП) импульсов тока ультразвуковой частоты на поверхности рельса возникает вихревой ток. Взаимодействие вихревого тока с внешним магнитным полем электромагнита приводит к возникновению ультразвуковых колебаний поверхности рельса, которая тем самым превращается в излучатель ультразвука. Прошедшие через изделие и отраженные от противоположной поверхности ультразвуковые колебания снова вызывают колебания поверхности рельса под ЭМАП. Поскольку эта поверхность тоже находится в магнитном поле электромагнита, её колебания приводят к возникновению тока на поверхности рельса, который трансформируется в обмотку приемного ЭМАП. Таким образом, при использовании ЭМАП излучателем и приемником ультразвука становится сама поверхность рельса, расположенная в зоне действии обмоток преобразователей.
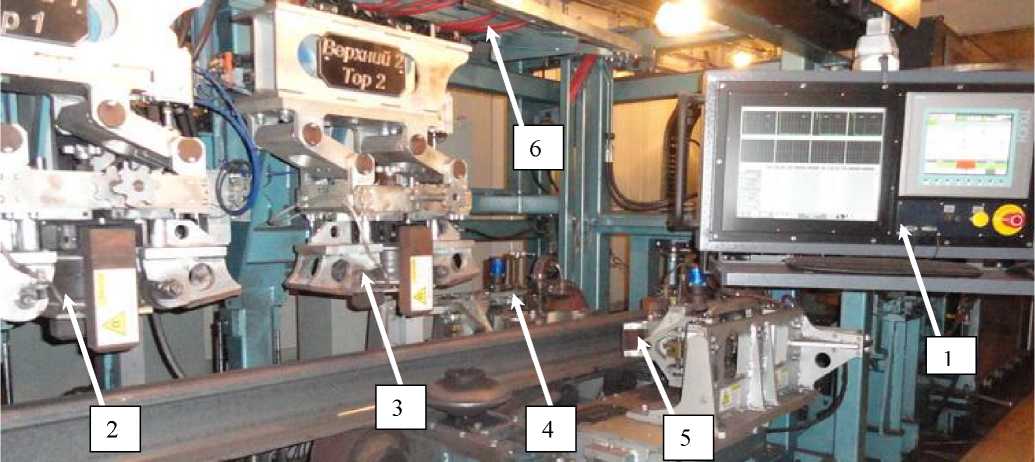
На рисунке 1 представлена фотография общего вида системы СОНОТРОН ТМ
Рисунок 1 - Общий вид системы СОНОТРОН тм
На рисунке 1 цифрами обозначены: 1 - пульт управления; 2 - ЭМАП «Тор 1»; 3 - ЭМАП «Тор 2»; 4 - ЭМАП «Side 1»; 5 - ЭМАП «Side 2»; 6 - компьютер микросистемы СОНОТРОН тм - ЕМАТ 880.
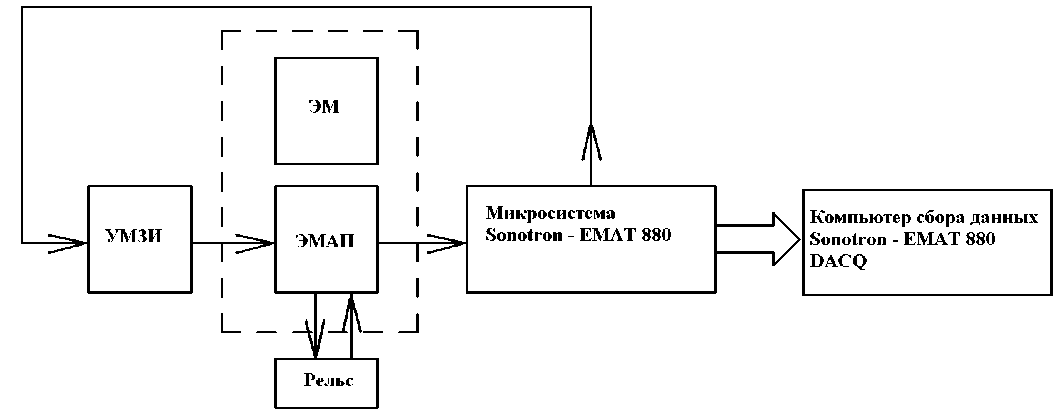
По каждому синхроимпульсу компьютера микросистемы СОНОТРОН тм - ЕМАТ 880 (Sonotron 880 MS) во всех четырех каналах одновременно с заданной вручную частотой заполнения и длительностью формируются радиоимпульсы, которые усиливаются в усилителе мощности зондирующих импульсов (УМЗИ). С выхода УМЗИ радиоимпульс поступает на соответствующий ЭМАП, расположенный под полюсом электромагнита (ЭМ). ЭМ создает магнитное поле, ориентированное по нормали к поверхности контролируемого изделия. Витки рабочей части ЭМАП параллельны поверхности изделия, поэтому к результате взаимодействия постоянного магнитного поля с полем вихревых токов в изделии возникают т.н. поперечные ультразвуковые колебания. Эти колебания распространяются в направлении противоположной поверхности рельса. Принятый ЭМАП-ом сигнал подается на соответствующий вход микросистемы СОНОТРОН тм - ЕМАТ 880, усиливается с заданным коэффициентом усиления, оцифровывается и отображается на экране компьютера микросистемы СОНОТРОН тм - ЕМАТ 880 в виде А-скана. Анализ амплитуды донных сигналов выполняется в зонах стробирующих импульсов. Для УЗК шейки рельса стробирующие импульсы располагают в зоне второго донного сигнала, для УЗК головки - как в зоне первого, так и в зоне второго донного сигнала. Далее оцифрованный сигнал передается в компьютер сбора данных СОНОТРОН тм - ЕМАТ 880 DACQ (Sonotron 880 DACQ), который сохраняет и отображает информацию по амплитуде донных сигналов в зонах, указанных выше стробирующих импульсов, в виде В-сканов по всей длине контролируемого рельса.
Схема измерительных каналов УЗК приведена на рисунке 3.
Рисунок 3 - Схема измерительного канала УЗК
Система предназначена для контроля рельсов типа: P43; P50; P65; P65K; UIC54; UIC60;
S49; 136RE.
приведены в таблице 2. Таблица 2.
|
Наименование параметра |
Значение параметра |
|
Минимальный размер выявляемого дефекта, мм |
48 |
|
Разрешающая способность измерения положения дефекта по длине объекта контроля, мм |
5 |
|
Диапазон измерения координат дефекта относительно переднего торца рельса, мм |
50 - 105000 |
|
Пределы допускаемого значения абсолютной погрешности измерения координат дефекта относительно переднего торца рельса, мм |
±50 |
|
Скорость транспортировки рельса через зону контроля, м/с |
1,5 |
|
Погрешность установки скорости транспортировки рельса через зону контроля, % |
±10 |
|
Номинальная частота заполнения зондирующих импульсов, МГц |
1,5 - 2,0 |
|
Предельное отклонение от номинального значения частоты заполнения зондирующих импульсов, % |
±10 |
|
Длительность зондирующего импульса, мкс |
4 - 10 |
|
Номинальное значение частоты следования зондирующих импульсов, Гц |
600 - 2000 |
|
Погрешность измерения отношения амплитуд сигналов на входе приемника, дБ |
±2 |
|
Отношение сигнал/шум при зазоре (2,0 - 2,5) мм, дБ, не менее: для канала Тор1 для каналов Тор2, Side1, Side2 |
28 20 |
|
Масса системы, не более, кг |
3600 |
|
Г абаритные размеры, длина х ширина х высота, мм |
3300х2400х3000 |
|
Срок службы, лет, не менее |
8 |
|
Питание системы: напряжение, В частота, Гц |
187-242 50±1 |
|
Условия эксплуатации: 0
|
5 - 40 20 - 80 90 - 110 |