
Номер по Госреестру СИ: 54222-13
54222-13 Весы вагонные
(DGW-M)
Назначение средства измерений:
Весы вагонные DGW-M (далее - весы) предназначены для:
- повагонного статического взвешивания порожних и груженых вагонов с сухими сыпучими, твердыми, а также жидкими грузами;
- повагонного взвешивания в движении порожних и груженых вагонов в составе без расцепки и составов в целом с сухими сыпучими, твердыми, а также жидкими грузами любой вязкости.


Внешний вид.
Весы вагонные
Рисунок № 1

Внешний вид.
Весы вагонные
Рисунок № 2

Внешний вид.
Весы вагонные
Рисунок № 3

Внешний вид.
Весы вагонные
Рисунок № 4

Внешний вид.
Весы вагонные
Рисунок № 5
Общие сведения
Дата публикации - 07.05.2020
Срок свидетельства - 16.07.2018
Номер записи - 144254
ID в реестре СИ - 366654
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Модификации СИ
ШЦСЦ, ШЦ-I-150, DGW-M LxW-100,
Производитель
Изготовитель - Фирма "Schenck Process GmbH"
Страна - ГЕРМАНИЯ
Населенный пункт -
Уведомление о начале осуществления предпринимательской деятельности - Да
Аннотация!
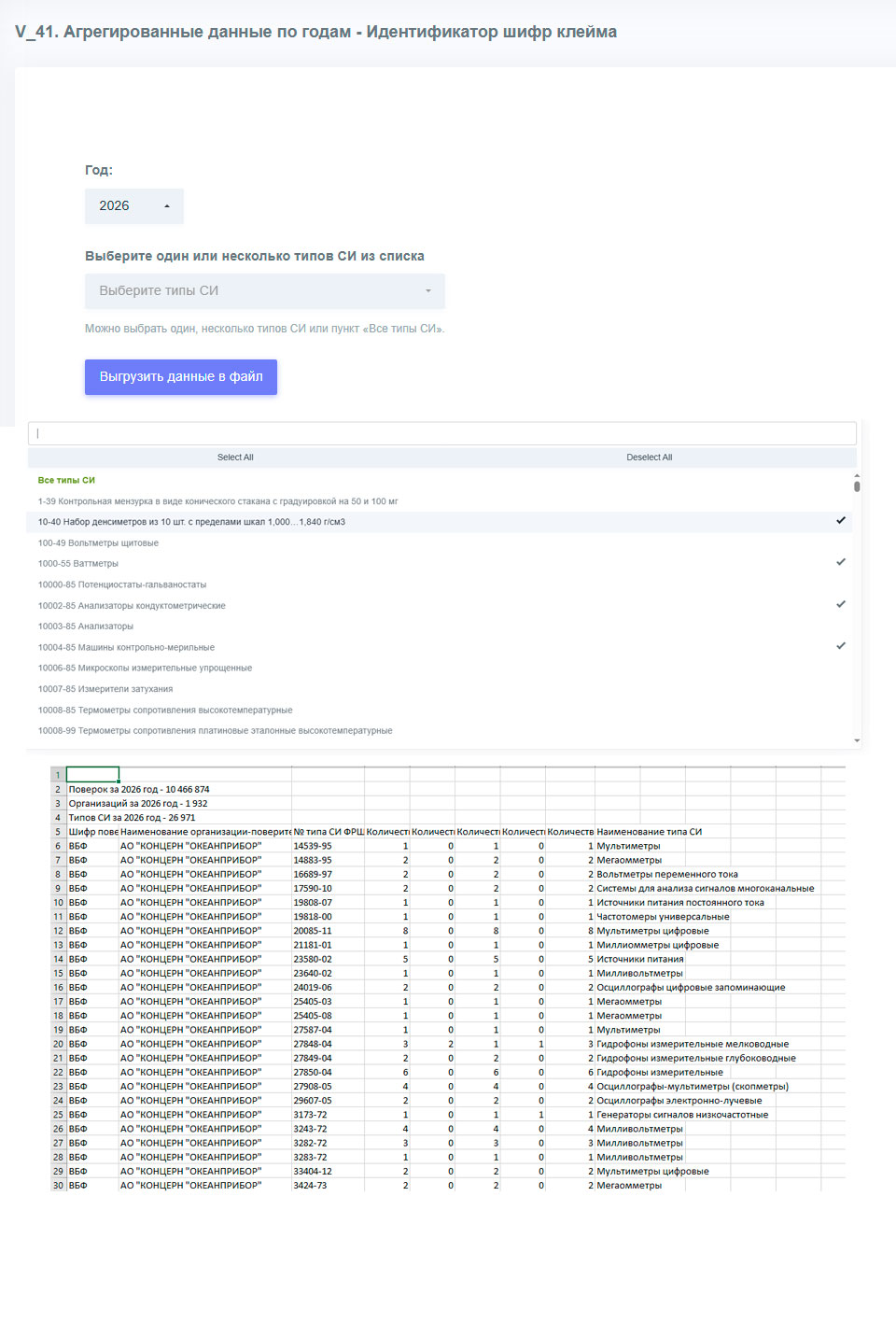
Отчет представляет собой выгрузку обработанных статистических данных по поверкам средств измерений за выбранный год. Выгрузка формируется в текстовый файл формата CSV в кодировке windows-1251 с разделителем ";".
Размер выгрузки может быть значительным и достигать до 1 миллиона строк.
Структура выгружаемых данных включает следующие поля:
Условный шифр знака поверки
Наименование организации-поверителя
Номер типа СИ ФРШИН
Общее количество поверок
Количество первичных поверок
Количество периодических поверок
Количество извещений о непригодности
Количество поверок для юридических лиц
Наименование типа СИ
Отчет предназначен для анализа результатов поверочной деятельности за выбранный календарный год. Использование в качестве идентификатора условного шифра знака поверки обеспечивает устойчивую и однозначную идентификацию поверителя по данным поверок и извещений о непригодности, в том числе в случаях отсутствия или неполноты сведений о записи в реестре аккредитованных лиц.
Сформированный файл может быть открыт в текстовых редакторах и табличных процессорах, включая Notepad++, Блокнот и MS Excel. Для открытия файла в MS Excel следует перейти на вкладку «Данные», выбрать команду «Из текста/CSV» и указать путь к файлу выгрузки.
Статистика
Кол-во поверок - 9
Выдано извещений - 0
Кол-во периодических поверок - 8
Кол-во средств измерений - 3
Кол-во владельцев - 2
Усредненный год выпуска СИ - 0
МПИ по поверкам - 364 дн.
Приказы РСТ, где упоминается данный тип СИ
№820 от 2013.07.15 Об утверждении типов средств измерений (Регистрационный номер в Гос.реестре СИ 54214-13 по 54225-13,16166-13,54226-13,54227-13,29437-13,54228-13 по 54233-13)
№2705 от 2018.12.20 О продлении срока действия свидетельств об утверждении типа средств измерений
Наличие аналогов СИ: Весы вагонные (DGW-M)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений Фирма "Schenck Process GmbH"
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
20897-01 01.03.2006 |
Весы конвейерные, BW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
20897-06 01.10.2011 |
Весы конвейерные, BW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
20897-07 01.05.2012 |
Весы конвейерные, BW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
22890-02 01.05.2007 |
Весы вагонные, SGW, DGW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
22890-07 01.06.2012 |
Весы вагонные, SGW, DGW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
22890-08 01.11.2013 |
Весы вагонные, DGW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
29741-05 01.08.2010 |
Весы вагонные, MULTIRAIL Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
29842-05 01.09.2010 |
Приборы весоизмерительные, Disobox Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
32736-06 01.10.2011 |
Дозаторы автоматические весовые непрерывного действия, MULTIDOS Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
32736-09 23.03.2020 |
Дозаторы автоматические весовые непрерывного действия, MULTIDOS Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
32887-06 01.11.2011 |
Весы платформенные, DVC Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
33304-06 01.01.2012 |
Дозаторы автоматические весовые непрерывного действия, MULTICOR Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
33308-06 08.05.2018 |
Датчики весоизмерительные тензорезисторные, PWS Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
33309-06 08.05.2018 |
Датчики весоизмерительные тензорезисторные, VBB Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
33497-06 08.05.2018 |
Дозаторы автоматические весовые непрерывного действия, MechaTron Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
33648-06 01.01.2012 |
Приборы весоизмерительные, DISOMAT B plus Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
33788-07 01.03.2012 |
Приборы весоизмерительные, INTECONT PLUS Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
33789-07 08.05.2018 |
Дозаторы автоматические весовые непрерывного действия, Multistream Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
34215-07 08.05.2018 |
Датчики весоизмерительные тензорезисторные, RTN SCHENCK Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
34292-07 01.04.2012 |
Приборы весоизмерительные, DISOCONT Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
34579-07 01.05.2012 |
Приборы весоизмерительные, INTECONT Opus Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
34581-07 01.05.2012 |
Приборы весоизмерительные, DISOMAT Opus Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
36280-07 01.12.2012 |
Приборы весоизмерительные, DISOMAT Tersus Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
1 год | |
|
39071-08 01.11.2013 |
Весы электронные, DCW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
39072-08 01.11.2013 |
Весы автомобильные, DSW/DFT Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
52831-13 |
Весы конвейерные, BEP Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
53571-13 27.05.2018 |
Приборы весоизмерительные, DISOMAT Tersus, DISOMAT Opus, DISOBOX Plus, INTECONT Opus, INTECONT Tersus, DISOCONT Tersus, DISOCONT Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
54160-13 11.07.2018 |
Дозаторы автоматические весовые непрерывного действия, MULTICOR Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
54215-13 16.07.2018 |
Весы конвейерные, Multibelt Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
54222-13 16.07.2018 |
Весы вагонные, DGW-M Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
54609-13 20.08.2018 |
Весы вагонные, MULTIRAIL Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
55374-13 |
Весы платформенные электронные, 31.383/001 Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
55375-13 |
Весы платформенные электронные, 31.383/002 Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
57010-14 08.04.2019 |
Весы вагонные, DGW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
57011-14 08.04.2019 |
Весы автомобильные, DFT Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ |
1 год |
|
60710-15 |
Весы вагонные, DGW-1 Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ МП |
1 год |
|
95466-25 |
Весы вагонные, DGW Фирма "Schenck Process GmbH" (ГЕРМАНИЯ ) |
ОТ МП |
1 год |
Кто поверяет Весы вагонные (DGW-M)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2026 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ФБУ "Волгоградский ЦСМ" (RA.RU.311474) | РСТ | 6 | 1 | 0 | 6 | 0 | 6 | 0 | 6 | |
| ФБУ "Волгоградский ЦСМ" (RA.RU.311474) | РСТ | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ООО "ЧТЗ-УРАЛТРАК" (RA.RU.312214) | 2 | 0 | 2 | 0 | 2 | 0 | 2 |
Стоимость поверки Весы вагонные (DGW-M)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|---|---|
|
ФБУ Кузбасский ЦСМ Кемеровская область |
9277 | 8561 |
|
ФБУ Омский ЦСМ Омская область |
9277 | 8561 |
|
ФБУ УРАЛТЕСТ Свердловская область |
9108 | 8561 |
|
ФБУ Тюменский ЦСМ Тюменская область |
6580 | 8561 |
Программное обеспечение
ПО весов является встроенным и делится на метрологически значимое и метрологически незначимое.
ПО не может быть модифицировано, загружено или прочитано через какой-либо интерфейс после загрузки. Доступ к изменению метрологически значимых параметров осуществляется только в сервисном режиме, вход в который защищен административным паролем и невозможен без применения специализированного оборудования производителя.
Пломбирования терминалов не требуется.
Идентификационным признаком ПО служит номер версии, который отображается на дисплее терминала при включении весов в сеть или может быть вызван через меню ПО терминала.
Идентификационные данные ПО приведены в таблице 1.
Таблица 1
|
Наименование ПО |
Идентификационное наименование ПО |
Номер версии (идентификационный номер) ПО |
Цифровой идентификатор ПО (контрольная сумма исполняемого кода) |
Алгоритм вычисления цифрового идентификатора ПО |
|
DISOMAT Tersus |
VxG 20450 |
Vxx2045y |
—* |
—* |
|
DISOMAT Opus |
VEG207y0 VKG207y0 |
Vxx20700 |
—* |
—* |
|
DISOBOX Plus |
VME210yy |
VWW2100y |
—* |
—* |
|
х = A-Z y = 0-9 * - Данные недоступны, так как данное ПО не может прочитано через какой-либо интерфейс |
быть модифицировано, загружено или | |||
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню «С» в соответствии с МИ 3286-2010.
Знак утверждения типа
Знак утверждения типананосится лазерным способом на маркировочную табличку, закреплённую на терминале, и типографским способом на титульный лист руководства по эксплуатации.
Сведения о методиках измерений
Сведения о методиках (методах) измеренийизложены в документе «Руководство по монтажу и эксплуатации весов вагонных DGW-M».
Нормативные и технические документы
Нормативные и технические документы, устанавливающие требования к весам вагонным DGW-M
-
1 ГОСТ Р 53228-2008 «Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания».
-
2 ГОСТ 8.021-2005 «ГСИ. Государственная поверочная схема для средств измерения массы».
-
3 ГОСТ Р 8.598-2003 «Весы для взвешивания железнодорожных транспортных средств в движении. Методика поверки».
-
4 Техническая документация изготовителя.
Поверка
Поверкав режиме статического взвешивания осуществляется по документу ГОСТ Р 53228-2008 «Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания» (приложение Н. Методика поверки), при взвешивании в движении - по ГОСТ Р 8.598-2003 «Весы для взвешивания железнодорожных транспортных средств в движении. Методика поверки».
Основные средства поверки:
-
- гири класса М1 и М1-2 по ГОСТ OIML R 111-1-2009;
-
- состав из груженых, частично груженных и порожних вагонов (только для твёрдых и сыпучих материалов), сформированный в соответствии с требованиями ГОСТ Р 8.598-2003 «Весы для взвешивания железнодорожных транспортных средств в движении. Методика поверки».
Испытательный центр
Государственный центр испытаний средств измерений ЗАО КИП «МЦЭ»,(ГЦИ СИ ЗАО КИП «МЦЭ»), аттестат аккредитации № 30092-10 от 30.09.2011 г.
Адрес: 125424, г.Москва, Волоколамское шоссе, д. 88, стр.8
Тел./факс (495) 491-78-12,
e-mail: sittek@mail.ru
Принцип действия весов основан на преобразовании деформации упругих элементов весоизмерительных тензорезисторных датчиков (далее - датчик), возникающей под действием силы тяжести взвешиваемого груза, в аналоговый выходной электрический сигнал, изменяющийся пропорционально массе груза. Далее сигнал поступает в терминал (со встроенным устройством обработки аналоговых данных), в котором сигнал обрабатывается, для отображения на цифровом табло результатов взвешивания в единицах массы.
Результаты взвешивания и значение массы груза индицируются на цифровом дисплее, расположенном на передней панели терминала вместе с функциональной клавиатурой, предназначенной для управления процессом взвешивания.
Конструктивно весы состоят из грузоприемного устройства (далее - ГПУ), имеющего от одного до шести весовых платформ с датчиками весоизмерительными тензорезисторными RTN, регистрационный номер в Госреестре СИ РФ 34215-07, производства «Schenk Process GmbH», Германия, с установочной оснасткой, терминалов (приборов весоизмерительных DISOMAT Tersus, DISOMAT Opus, DISOBOX Plus, регистрационный номер в Госреестре СИ РФ 53571-13, производства «Sc-heno-k Process GmbH», Германия), и внешних электронных устройств (компьютера или принтера) со встроенным программным обеспечением (ПО).
Информация о массе взвешиваемого груза по защищенному последовательному интерфейсу (интерфейс обмена информации) RS-232C, RS-485 может быть передана на внешние устройства (ПЭВМ, принтер и т.п.).
ПО терминалов позволяет осуществлять взвешивание в статическом и в динамическом режимах, производить распознавание типа и порядкового номера вагона в составе, определение количества осей, положение локомотива и вагона в составе, направление движения состава и скорости движения каждого взвешиваемого вагона, формирование протоколов измерения массы вагонов и составов из них. На дисплей также выводится статус процесса взвешивания, порядковый номер взвешиваемого вагона в составе и самого состава.
Результаты измерений выводятся на дисплей компьютера. Управление весами осуществляется с помощью функциональных клавиш терминала или с помощью компьютера.
В весах предусмотрены следующие устройства и функции:
а) при статическом взвешивании:
-
- устройство индикации отклонения от нуля (ГОСТ Р 53228-2008, п. 4.5.5);
-
- устройство первоначальной установки нуля весов (ГОСТ Р 53228-2008, п. Т.2.7.2.4);
-
- устройство полуавтоматической установки нуля (ГОСТ Р 53228-2008, п.
Т.2.7.2.2);
-
- устройство слежения за нулем (ГОСТ Р 53228-2008, п. Т.2.7.3);
-
- устройство выборки массы тары (ГОСТ Р 53228-2008, п. Т.2.7.4);
б) при взвешивании в движении:
-
- отображение результатов взвешивания, массы вагона и состава;
- автоматическое определение положения локомотива и исключение его массы из результатов взвешивания при взвешивании вагонов без расцепки;
- автоматическое определение направления движения ;
- автоматическое определение количества осей и скорости движения каждого взвешиваемого вагона;
- сигнализация о превышении предела допускаемой скорости движения. В весах предусмотрено устройство сигнализации о перегрузке .
Весы изготавливаются однодиапазонными в модификациях, отличающихся значением максимальной нагрузки, количеством платформ в ГПУ и при заказе имеют обозначения вида:
DGW-M LxW-XXX,
где LxW - размер ГПУ;
XXX - максимальная нагрузка (Мах).
Общий вид весов, терминалов и ГПУ представлены на рисунках 1 - 5.
Рисунок 1 - Общий вид весов
Рисунок 2 - Общий вид терминала DISOBOX Plus
Рисунок 3 - Общий вид терминала
DISOMAT Tersus
Рисунок 4 - Общий вид терминала DISOMAT Opus
Рисунок 5 - Общий вид ГПУ весов
На терминале весов прикрепляется табличка, содержащая следующую информацию: - знак утверждения типа средств измерений;
- наименование или товарный знак предприятия - изготовителя;
- номер весов по системе нумерации предприятия- изготовителя ;
- обозначение типа весов ;
- год изготовления;
- класс точности с указанием соответствующих способов взвешивания;
- значение максимальной нагрузки (Max);
- значение минимальной нагрузки (Min);
- значения поверочного деления (е ) и действительной цены деления (d);
- пределы допускаемой скорости движения транспортных средств при взвешивании.
1 Весы (модификация по заказу) - 1 шт .
2 Руководство по эксплуатации - 1 экз.
-
1 Статическое взвешивание
-
1.1 Класс точности по ГОСТ Р 53228-2008 средний (III).
-
1.2 Значения максимальной (Мах) и минимальной (Min) нагрузки, действительной цены деления (d), поверочного деления (е), числа поверочных делений (n), интервала взвешивания и пределов допускаемой погрешности при поверке (mpe) приведены в таблице 2.
-
Таблица 2
|
Модификация |
Мах, т |
Min, т |
d и е, кг |
Диапазон взвешивания, т |
Пределы допускаемой погрешности при поверке (mpe), кг |
Число поверочных делений (n) |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
DGW-M LxW- |
100 |
1 |
50 |
От 1 до 25 включ. |
± 25 |
2000 |
|
100 |
Св. 25 до 100 включ. |
± 50 | ||||
|
DGW-M LxW- |
100 |
2 |
100 |
От 2 до 50 включ. |
± 50 |
1000 |
|
100 |
Св. 50 до 100 включ. |
± 100 | ||||
|
DGW-M LxW- 150 |
От 1 до 25 включ. |
± 25 | ||||
|
150 |
1 |
50 |
Св. 25 до 100 включ. |
± 50 |
3000 | |
|
Св. 100 до 150 включ. |
± 75 | |||||
|
DGW-M LxW- 200 |
От 1 до 25 включ. |
± 25 | ||||
|
200 |
1 |
50 |
Св. 25 до 100 включ. |
± 50 |
4000 | |
|
Св. 100 до 200 включ. |
± 75 | |||||
|
DGW-M LxW- |
200 |
2 |
100 |
От 2 до 50 включ. |
± 50 |
2000 |
|
200 |
Св. 50 до 200 включ. |
± 100 |
-
1.3 Пределы допускаемой погрешности в эксплуатации равны удвоенному значению пределов допускаемых погрешностей при поверке.
-
1.4 Диапазон выборки массы тары (Т-), % от Max от 0 до 100.
-
1.5 Влияние устройства установки нуля на результат
взвешивания, кг 0,25е.
-
1.6 Предельная нагрузка (Lim), % от Max, не более 150.
1.7 Показания индикации массы, кг, не более
1.8 Диапазон установки на нуль и слежения за (суммарный), % от Max
1.9 Диапазон первоначальной установки нуля, % от Max
нулём
Мах+9е.
4.
20.
-
2 Взвешивание в движении
-
2.1 Пределы взвешивания:
60; 100; 150; 200.
1. 20; 50; 100. двухстороннее при тяге и толкании состава локомотивом.
-
- наибольший предел взвешивания (НПВ ), т
- наименьший предел взвешивания ( НмПВ ), т
-
2.2 Дискретность отсчета, кг
-
2.3 Направление при взвешивании в движении
-
2.4 Диапазон допускаемых значений скорости при взвешивании в движении, км/ч от 3 до 10.
-
2.5 Значения пределов допускаемой погрешности весов при поверке и в эксплуатации при повагонном взвешивании в движении вагона (цистерны) приведены в таблице 3.
Таблица 3
|
Пределы допускаемой погрешности в диапазоне | |
|
от НмПВ до 35% НПВ вкл., % от 35% НИВ |
св. 35% HI IB. % от измеряемой массы |
|
± 0,3 |
± 0.3 |
-
2.6 Класс точности и пределы допускаемой погрешности весов при первичной поверке и в эксплуатации при взвешивании в движении состава из n вагонов приведены в таблице 4.
Таблица 4
|
Пределы допускаемой погрешности в диапазоне | |
|
от НмПВхп до 35% HI IBxn вкл., % от 35% HI IBxn |
св. 35% НПВхп, % от измеряемой массы |
|
± 0,2 |
± 0,2 |
-
2.7 Значения пределов допускаемой погрешности для конкретного значения массы округляют до ближайшего большего значения, кратного дискретности весов.
Примечания:
-
1 При превышении предела допускаемой скорости движения вагона во время его взвешивания соответствующие регистрируемые значения массы вагона, а также массы состава куда он входит, маркируются специальным знаком.
-
2 При взвешивании в движении вагонов в составе без расцепки весы не регистрируют значения массы локомотива или отдельных его частей.
-
3 Технические характеристики
30.
500. от минус 30 до плюс 40.
220 -+2323 ;
50 ± 1. 600. от 1 до 10.
-
3.1 Время прогрева весов, мин
-
3.2 Длина линии связи между ГПУ терминалом, м, не более
-
3.3 Диапазон рабочих температур весов, °С
-
3.4 Параметры электрического питания от сети переменного тока:
-
- напряжение, В
- частота, Гц
-
3.5 Потребляемая мощность, В-Л, не более
-
3.6 Количество грузоприёмных платформ, шт.
-
3.7 Габаритные размеры грузоприёмной платформы, мм
- длина от 3000 до 15000.
- ширина 1900.
-
3.8 Масса грузоприемной платформы, кг, не более от 900 до 45000.
-
3.9 Средний срок службы, лет 15.