
Номер по Госреестру СИ: 51920-12
51920-12 Весы вагонные
(TRAPPER)
Назначение средства измерений:
Весы вагонные TRAPPER (далее-весы) предназначены для:
- повагонного статического взвешивания порожних и груженых вагонов с сухими сыпучими, твердыми, а также жидкими грузами;
- повагонного взвешивания в движении порожних и груженых вагонов в составе без расцепки и составов в целом с сухими сыпучими, твердыми, а также жидкими грузами любой вязкости;
- поосного и потележечного взвешивания в движении цистерн с жидкими грузами с кинематической вязкостью не менее 59 мм2/с.


Внешний вид.
Весы вагонные
Рисунок № 1
Внешний вид.
Весы вагонные
Рисунок № 2

Внешний вид.
Весы вагонные
Рисунок № 3
Общие сведения
Дата публикации - 17.03.2025
Срок свидетельства - 30.11.2017
Номер записи - 141621
ID в реестре СИ - 364021
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Модификации СИ
нет данных, TRAPPER,
Производитель
Изготовитель - Фирма "Tamtron Systems Oy"
Страна - ФИНЛЯНДИЯ
Населенный пункт -
Уведомление о начале осуществления предпринимательской деятельности - Да
Статистика
Кол-во поверок - 7
Выдано извещений - 0
Кол-во периодических поверок - 0
Кол-во средств измерений - 1
Кол-во владельцев - 1
Усредненный год выпуска СИ - 0
МПИ по поверкам - 365 дн.
Приказы РСТ, где упоминается данный тип СИ
№1075 от 2012.11.29 Об утверждении типав средств измерений (Регистрационный номер в Гос.реестре СИ 51914-12 по 51923-12,20739-12,18044-12)
Наличие аналогов СИ: Весы вагонные (TRAPPER)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений Фирма "Tamtron Systems Oy"
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
13777-07 01.08.2012 |
Весы вагонные, Trapper Scalex Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
1 год | |
|
13778-07 01.06.2012 |
Весы автомобильные, Scalex 1000 Truck Scale Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
1 год | |
|
16252-07 01.07.2012 |
Весы платформенные, SCALEX 500 Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
1 год | |
|
44229-10 |
Весы автомобильные для взвешивания в движении, SCALEX DW 600 Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ |
1 год |
|
51920-12 30.11.2017 |
Весы вагонные, TRAPPER Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ |
1 год |
|
52185-12 24.12.2017 |
Весы автомобильные, Scalex 1000/Scalex 1001 Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ |
1 год |
|
74282-19 05.03.2024 |
Весы вагонные автоматические, Scalex Wild Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ МП |
1 год |
|
74534-19 26.03.2024 |
Весы автомобильные, Scalex 1000/Scalex 1001 Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ МП |
1 год |
|
74533-19 26.03.2024 |
Весы автомобильные, Scalex DW 600 Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ МП |
1 год |
|
74532-19 26.03.2024 |
Весы вагонные, TRAPPER Фирма "Tamtron Systems Oy" (ФИНЛЯНДИЯ ) |
ОТ МП |
1 год |
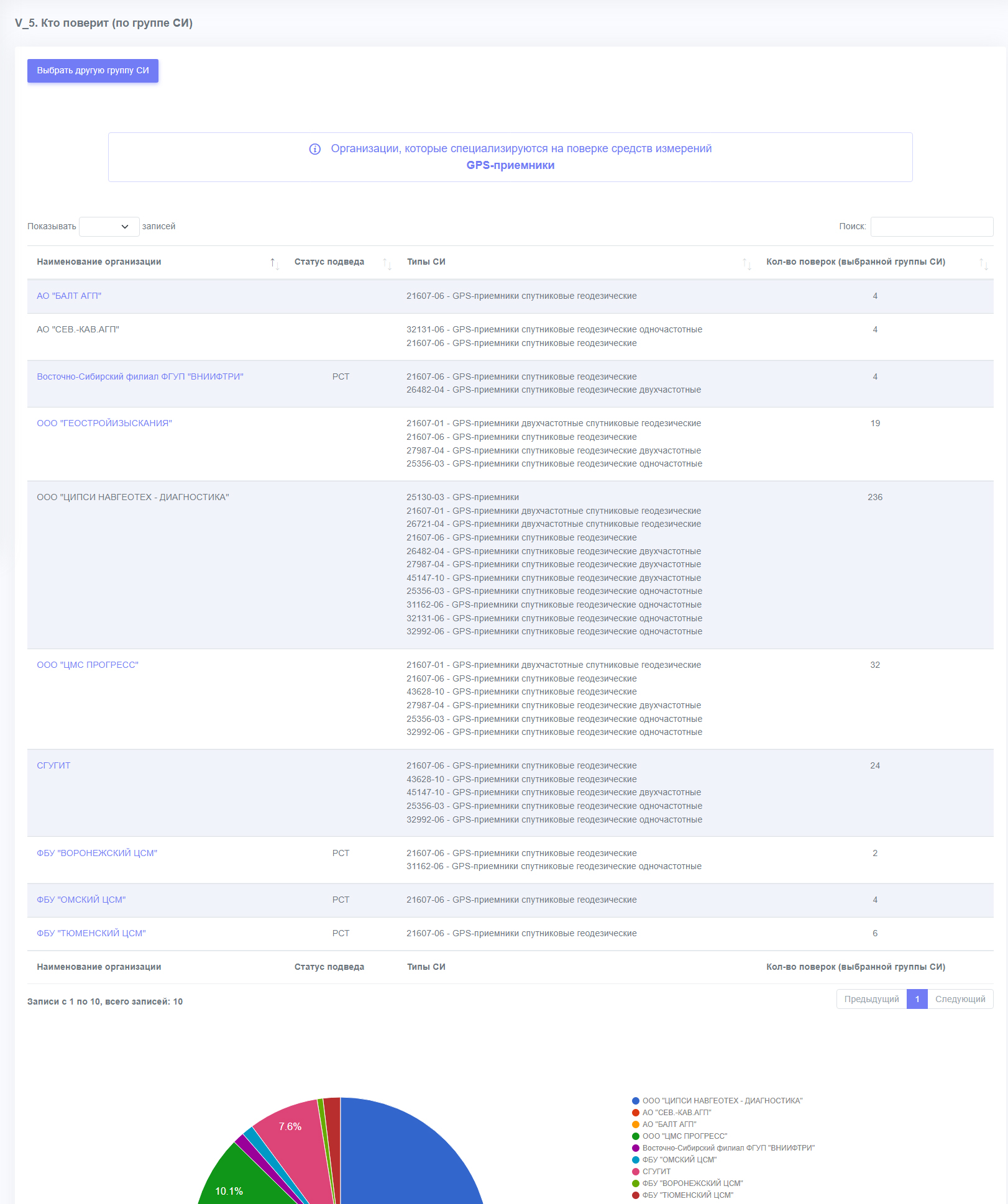
Отчет "Подбор поверителей по группе средств измерений измерений" позволяет быстро найти организации, специализирующиеся поверкой СИ определенной группы. Каталог содержит Более 900 групп СИ.
Для запуска отчета достаточно выбрать из списка интересующую группу СИ и нажать кнопку "Показать организации-поверители".
В результатах поиска будет отображена таблица, содержащая информацию об организациях, проводивших поверку, их статус (подвед РСТ или нет), модификации типов СИ, общее количество поверок и количество поверок, сделанных в текущем году.
Кто поверяет Весы вагонные (TRAPPER)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2026 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| Южно-Уральская железная дорога - филиал ОАО "РЖД" (RA.RU.310555) | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| Южно-Уральский центр метрологии ЮУЖД - филиала ОАО "РЖД" (RA.RU.312751) | 2 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| ОАО "РЖД" (RA.RU.310555) | 4 | 0 | 0 | 0 | 0 | 0 | 0 |
Стоимость поверки Весы вагонные (TRAPPER)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|---|---|
|
ФБУ Кузбасский ЦСМ Кемеровская область |
5387 | 6616 |
|
ФБУ Омский ЦСМ Омская область |
5387 | 6616 |
|
ФБУ УРАЛТЕСТ Свердловская область |
9108 | 6616 |
|
ФБУ Тюменский ЦСМ Тюменская область |
6580 | 6616 |
Программное обеспечение
ПО весов является встроенным и состоит из модулей (подпрограмм) обслуживания периферии, расчета веса и взаимодействия с пользователем.
ПО имеет наименование RailPRO II состоит из двух отдельных программных модулей: Scalex и Scxcom.
Модуль Scalex представляет собой интерфейс пользователя (клиент) и работает с блоком Scalex 2200 и системной базой данных посредством служебных запросов, обрабатываемых серверной программой Scxcom.
Серверная/коммуникационная программа Scxcom отвечает за связь блоком Scalex 2200 и управление системной базой данных. Она обслуживает запросы программы Scalex, обеспечивая работу блока Scalex 2200 и базы данных.
Метрологически значимое ПО Scalex хранится в защищенной от демонтажа перепрограммируемой микросхеме памяти EPROM, расположенной на плате АЦП весового терминала и загружается на заводе-изготовителе с использованием специального оборудования. ПО не может быть модифицировано, загружено или прочитано через какой-либо интерфейс после загрузки. Доступ к изменению метрологически значимых параметров осуществляется только в сервисном режиме работы весовых терминалов, вход в который защищен административным паролем и невозможен без применения специализированного оборудования производителя.
Идентификационным признаком ПО служит номер версии.
Для предотвращения воздействий и защиты законодательно контролируемых параметров служит:
- программная идентификация пользователя по имени и паролю ;
- пароль, вводимый после поверки;
- индикация значений калибровочного нуля и коэффициентов при поверке.
Идентификационные данные ПО приведены в таблице 1.
Таблица 1
|
Наименова ние ПО |
Идентифика ционное наименован ие |
Номер версии (идентификацио нный номер) |
Цифровой идентификатор (контрольная сумма исполняемого кода) |
Алгоритм вычисления цифрового идентификатора |
|
RailPRO II |
Scalex |
2.x.x (x=0...9) |
-* |
-* |
|
* - Данные недоступны, так как данное ПО не может быть модифицировано, загружено или прочитано через какой-либо интерфейс после опломбирования | ||||
Уровень защиты ПО от непреднамеренных и преднамеренных изменений соответствует уровню защиты «С» в соответствии с МИ 3286-2010.
Знак утверждения типа
Сведения о методиках измерений
Сведения о методиках (методах) измеренийизложены в документе «Весы вагонные TRAPPER. Руководство по эксплуатации».
Нормативные и технические документы
Нормативные документы, устанавливающие требования к весам-
1 ГОСТ 8.021-2005 «ГСИ. Государственная поверочная схема для средств измерения массы».
-
2 ГОСТ 30414-96 «Весы для взвешивания транспортных средств в движении. Общие технические требования».
-
3 ГОСТ Р 53228-2008 «Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания».(Приложение Н. Методика поверки).
-
4 ГОСТ Р 8.598-2003 «Весы для взвешивания железнодорожных транспортных средств в движении. Методика поверки».
-
5 Техническая документация на весы TRAPPER фирмы «Tamtron Systems Oy », Финляндия.
Рекомендации по области применения в сфере государственного регулирования обеспечения единства измерений осуществление торговли и товарообменных операций.
Поверка
Поверкавесов в режиме статического взвешивания производится по ГОСТ Р 53228-2008 «Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания». (Приложение Н. Методика поверки), при взвешивании в движении - по ГОСТ Р 8.598-2003 «Весы для взвешивания железнодорожных транспортных средств в движении. Методика поверки».
Основные средства поверки:
-
- гири эталонные 4-го разряда в соответствии с ГОСТ 8.021-2005;
-
- состав из груженых, частично груженных и порожних вагонов, сформированный в соответствии с требованиями ГОСТ Р 8.598-2003.
Изготовитель
Фирма «Tamtron Systems Oy», Финляндия,Kaarmesaarentie 3 B, FI-02171 Espoo, Finland
Телефон +358 9 41300400 Факс: +358 9 4523104 E-mail: sales@tamtronsystems.com
Испытательный центр
Государственный центр испытаний средств измерений ЗАО КИП «МЦЭ»125424, г. Москва, Волоколамское шоссе, стр. 8
тел.: (495) 491 78 12, (495) 491 86 55
E-mail: sittek@mail.ru, kip-mce@nm.ru
В настоящем описании используются термины и определения согласно ГОСТ Р 53228-2008.
Принцип действия весов основан на преобразовании деформации упругих элементов тензорезисторных весоизмерительных датчиков (далее - датчики), возникающей под действием силы тяжести взвешиваемого груза, в аналоговый электрический сигнал, изменяющийся пропорционально массе груза. Далее сигнал поступает в терминал, в котором сигнал обрабатывается, и значение массы груза отображается на дисплее терминала. На передней панели терминала размещена клавиатура, предназначенная для управления процессом взвешивания. В весах применяется 6-проводная схема подключения весоизмерительных датчиков к терминалу.
Конструктивно весы состоят из грузоприемного устройства (далее - ГПУ), включающего одну или несколько платформ, опирающихся на весоизмерительные тензорезисторные датчики RС3 или датчики весоизмерительные балочные из нержавеющей стали (далее - датчик SB2) производства фирмы «Flintec GmbH», Германия, (регистрационные номера в Госреестре СИ РФ 50843-12 и 46027-10), терминала Scalex 1700 и блока управления взвешиванием (далее - блок) Scalex 2200 производства фирмы «Tamtron Systems Oy», Финляндия.
Терминал Scalex 1700 обеспечивает напряжением питания тензодатчики, принимает исходящий сигнал, преобразует сигнал в цифровую величину, отображает результат взвешивания на дисплее терминала (в килограммах) и передает цифровой код блоку управления взвешиванием Scalex 2200.
Блок Scalex 2200 включает в себя CPU (центральный процессор), EPROM программную память, память RAM, блок питания и интерфейсы для компьютера, цифровые взвешивающие терминалы Scalex 1700. Блок управления взвешиванием включает в себя программное обеспечение для динамического взвешивания.
Информация о массе взвешиваемого груза от блока Scalex 2200 по последовательному защищенному интерфейсу RS-232С или RS-485 может быть передана на внешние устройства (ПЭВМ, дисплей , принтер и т.п.).
Весы оснащены индуктивным рельсовым контактором, установленным на рельсах. Контактор передает сигнал блоку управления взвешиванием о каждой проехавшей колесной паре.
Взвешивание начинается и прекращается по этим сигналам.
В весах предусмотрены следующие основные устройства и функции: а) при статическом взвешивании:
-
- устройства тарирования;
-
- устройство установки нуля и слежения за нулем;
- устройство показывающее с расширением ;
- отображение значений массы брутто, нетто, тары ;
б) при взвешивании в движении:
- отображение результатов взвешивания ( массы вагона и состава );
- автоматическое определение положения локомотива и исключение его массы из результатов взвешивания при взвешивании вагонов без расцепки;
- автоматическое определение направления движения;
- автоматическое определение количества осей и скорости движения каждого взвешиваемого вагона;
- сигнализация о превышении предела допускаемой скорости движения .
Программное обеспечение (ПО) весов позволяет производить непрерывную диагностику состояния каждого весоизмерительного датчика индивидуально.
К терминалу возможно подключение дополнительных устройств индикации, аппаратуры автоматической идентификации вагонов, периферийного оборудования.
Весы выпускаются однодиапазонными в модификациях, отличающихся значением максимальной нагрузки, количеством платформ в ГПУ, типом используемых датчиков.
Модификации весов имеют обозначения вида TRAPPER --[1]/ [2]/ [3]:
где [1] - режим взвешивания:
SRS- статическое взвешивание;
DRS - статическое взвешивание и взвешивание в движении;
-
[2] - максимальная нагрузка;
-
[3] - длина платформы.
Общий вид весов приведен на фото 1, терминала Scalex 1700 на фото 2, блока управления взвешиванием Scalex 2200 на фото 3.
Фото 1 - Пример общего вида весов
Поверительное клеймо ставится на пломбу, установленную на винт безопасности , расположенный на передней панели Scalex 1700 и скрывающий кнопку настройки
Фото 2 - Общий вид терминала Scalex 1700
Фото 3 - Общий вид блока Scalex 2200
На ГПУ весов прикрепляется табличка, содержащая следующую информацию:
-
- знак утверждения типа средств измерений;
-
- наименование или товарный знак предприятия-изготовителя;
-
- номер весов по системе нумерации предприятия-изготовителя;
-
- обозначение типа весов;
-
- год изготовления;
-
- класс точности с указанием соответствующих способов взвешивания;
-
- значение Max;
-
- значение Min;
-
- значение е и d;
-
- пределы допускаемой скорости движения транспортных средств при взвешивании.
-
1 Статическое взвешивание
-
1.1 Класс точности по ГОСТ Р 53228-2008 ...................................................... средний (III)
-
1.2 Максимальная нагрузка (Мах), минимальная нагрузка (Min), действительная цена деления (d), поверочное деление (е), пределы допускаемой погрешности, число поверочных делений (n) приведены в таблице 2.
-
Таблица 2
|
Модификация |
Мах, т |
Min, т |
d и е, кг |
Диапазоны взвешивания, т |
Пределы допускаемой погрешности при поверке, кг |
Число поверочных делений (n) |
|
TRAPPER-[1]/100/[3] |
100 |
1 |
50 |
От 1 до 25 включ. |
± 25 |
2000 |
|
Св. 25до 100 включ. |
± 50 | |||||
|
TRAPPER-[1]/150/[3] |
150 |
1 |
50 |
От 1 до 25 включ. |
± 25 |
3000 |
|
Св. 25 до 100 включ. |
± 50 | |||||
|
Св. 100 до 150 включ. |
± 75 |
|
Модификация |
Мах, т |
Min, т |
d и е, кг |
Диапазоны взвешивания, т |
Пределы допускаемой погрешности при поверке, кг |
Число поверочных делений (n) |
|
TRAPPER-[1]/200 [3] |
200 |
1 |
50 |
От 1 до 25 включ. |
± 25 |
4000 |
|
Св. 25 до 100 включ. |
± 50 | |||||
|
Св. 100 до 200 включ. |
± 75 | |||||
|
TRAPPER-[1]/100/[3] |
100 |
2 |
100 |
От 2 до 50 включ. |
± 25 |
1000 |
|
Св. 50 до 100 включ. |
± 50 | |||||
|
TRAPPER-[1]/150/ [3] |
150 |
2 |
100 |
От 2 до 50 включ. |
± 25 |
1500 |
|
Св. 50 до 150 включ. |
± 50 | |||||
|
TRAPPER-[1]/200/[3] |
200 |
2 |
100 |
От 2 до 50 включ. |
± 50 |
2000 |
|
Св. 50 до 200 включ. |
± 100 |
Пределы допускаемой погрешности в эксплуатации равны удвоенному значению пределов допускаемых погрешностей при поверке.
Пределы допускаемой погрешности весов после выборки массы тары соответствуют пределам допускаемой погрешности для массы брутто.
-
1.3 Диапазон выборки массы тары (Т-), % от Max............................................. от 0 до 100
-
1.4 Влияние устройства установки нуля на результат взвешивания, кг
-
1.6 Показания индикации массы, кг, не более.......................................................... Мах+9е
-
1.7 Диапазон установки на нуль и слежения за нулём (суммарный), % от Max
-
1.9 Максимальная нагрузка одной платформы, т...................... 10; 20; 50; 60; 80; 100; 120
-
1.10 Минимальная нагрузка одной платформы, т.................................................... 2; 5; 10
-
1.11 Порог чувствительности для весов
-
2 Взвешивание в движении
-
2.1 Пределы взвешивания:
-
-
- наибольший предел взвешивания (НПВ), т ................................................. 100; 150; 200
-
2.2 Дискретность отсчета, кг.......................................................................................50,100
-
2.3 Направление движения - двухстороннее при тяге и толкании состава локомотивом;
-
2.4 Диапазон допускаемых значений скорости при взвешивании в движении:
-
- при поосном взвешивании ........................................................................ от 2 до 10 км/ч
-
- при потележечном и повагонном взвешивании ....................................... от 2 до 25 км/ч
-
2.5 Классы точности по ГОСТ 30414-96 и пределы допускаемой погрешности весов при взвешивании в движении при поосном и потележечном взвешивании в движении вагона (цистерны) приведены в таблице 3.
Таблица 3
|
Класс точности |
Пределы допускаемой погрешности | |
|
от НмПВ до 35% НПВ вкл., % от 35% НПВ |
св. 35%НПВ, % от измеряемой массы | |
|
0,5 |
±0,25 |
±0,25 |
|
1 |
±0,5 |
±0,5 |
|
2 |
±1,0 |
±1,0 |
Классы точности по ГОСТ 30414-96, значения пределов допускаемой погрешности при первичной поверке при поосном и потележечном взвешивании в движении состава из n вагонов (цистерн) приведены в таблице 4. При фактическом числе вагонов (цистерн), превышающем 10, значение n принимают равным 10.
Таблица 4
|
Класс точности |
Пределы допускаемой погрешности | |
|
от НмПВ до 35% НПВ-n вкл., % от 35% НПВ-n |
св. 35%НПВ-п, % от измеряемой массы | |
|
0,5 |
±0,25 |
±0,25 |
|
1 |
±0,5 |
±0,5 |
|
2 |
±1,0 |
±1,0 |
Классы точности по ГОСТ 30414-96, значения пределов допускаемой погрешности при первичной поверке при взвешивании в движении вагона (цистерны) приведены в таблице 5. Таблица 5
|
Класс точности |
Пределы допускаемой погрешности | |
|
от НмПВ до 35 % НПВ вкл., % от 35 % НПВ |
св. 35 % НПВ, % от измеряемой массы | |
|
0,2 |
±0,1 |
±0,1 |
|
0,5 |
±0,25 |
±0,25 |
|
1 |
±0,5 |
±0,5 |
|
2 |
±1,0 |
±1,0 |
Классы точности по ГОСТ 30414-96, значения пределов допускаемой погрешности при первичной поверке при взвешивании в движении состава из n вагонов (цистерн) приведены в таблице 6. При фактическом числе вагонов (цистерн), превышающем 10, значение n принимают равным 10.
Таблица 6
|
Класс точности |
Пределы допускаемой погрешности | |
|
от НмПВ до 35% НПВ-n вкл., % от 35% НПВ-n |
св. 35% НПВ-n, % от измеряемой массы | |
|
1 |
2 |
3 |
|
0,2 |
±0,1 |
±0,1 |
|
0,5 |
±0,25 |
±0,25 |
|
1 |
2 |
3 |
|
1 |
±0,5 |
±0,5 |
|
2 |
±1,0 |
±1,0 |
Пределы допускаемой погрешности весов для взвешивания в движении, указанные в таблицах 3-6, в эксплуатации удваиваются.
Значения пределов допускаемой погрешности весов для взвешивания в движении для конкретного значения массы округляют до ближайшего большего значения, кратного дискретности весов.
-
3 Диапазон рабочих температур весов , °С:
- для ГПУ c датчиками SB2............................................................
от минус 30 до плюс 40
от минус 10 до плюс 40
- для ГПУ c датчиками RC3...........................................................
- терминала Scalex 1700 и блока Scalex 2200 ................................ от минус 10 до плюс 40
-
4 Параметры электрического питания от сети переменного тока:
- напряжение, В ...........................................................................................................220 -+ 3223
- частота, Гц ..................................................................................................................50 ± 1
-
5 Потребляемая мощность, В-A, не более ......................................................................300
-
6 Количество весовых платформ ........................................................................... от 1 до 4
-
7 Габаритные размеры весовой платформы, мм
-
- длина ...................................................................................................... от 3 000 до 30 000
-
- ширина .................................................................................................... от 1 000 до 6 000
-
- высота ......................................................................................................... от 3 00 до 1200
-
8 Масса одной весовой платформы, т, не более ................................................................15
-
9 Средний срок службы, лет .............................................................................................35