
Номер по Госреестру СИ: 15389-13
15389-13 Системы дорожного контроля измерительные
(СДК.Ам)
Назначение средства измерений:
Системы дорожного контроля измерительные СДК.Ам (далее - системы) предназначены для:
- измерения осевых нагрузок и массы в движении или с остановкой порожних и груженых автодорожных колёсных транспортных средств, в том числе автопоездов, автоцистерн с жидкими грузами, включая сжиженные газы;
- статического взвешивания грузов, полностью размещаемых на грузоприемной платформе.


Внешний вид.
Системы дорожного контроля измерительные
Рисунок № 1
Общие сведения
Дата публикации - 08.05.2018
Срок свидетельства - 11.07.2018
Номер записи - 90933
ID в реестре СИ - 313333
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Модификации СИ
СДК.Ам-1-1, СДК.Ам-1, СДК.Ам-03-2-2, СДК.Ам-02-1-2, СДК.Ам-01-2-2, СДК.Ам-01-1-2, СДК.Ам, модификации СДК.Ам-1-1ВИ, СДК.Ам мод. СДК.Ам1-1. (эл. клеймо В37F6633), СДК.Ам мод. СДК.Ам1-1., СДК.Ам, СДК ам, Нет модификации, нет данных, мод. СДК.Ам-1-2, мод. СДК.Ам-1-1, мод. СДК.Ам -1-2, мод. СДК.Ам -1-1, 1-1-2-ВИ, -,
Производитель
Изготовитель - ООО НИПВФ "Тензор"
Страна - РОССИЯ
Населенный пункт - г.Ростов-на-Дону
Уведомление о начале осуществления предпринимательской деятельности - Да
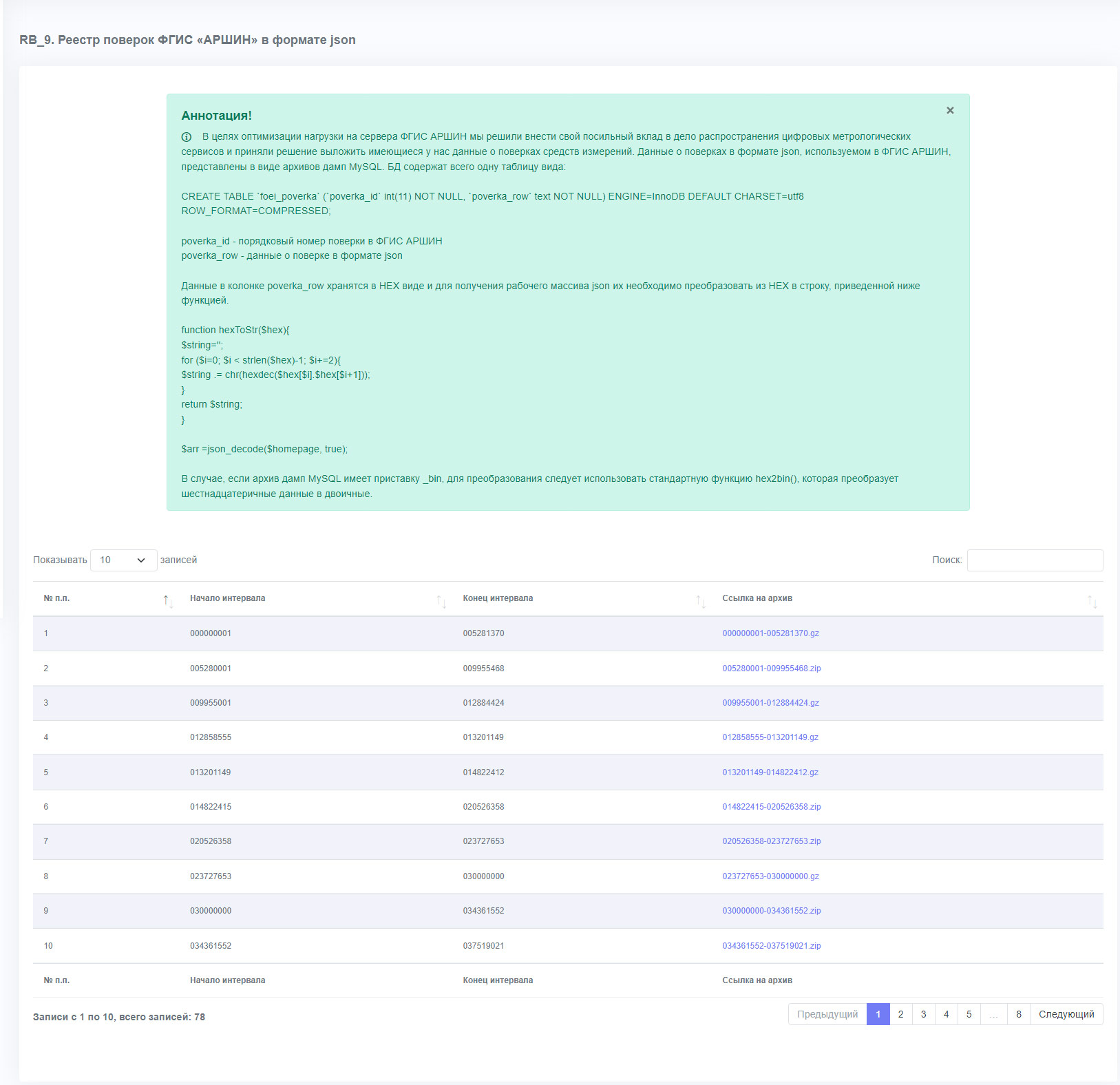
CREATE TABLE `foei_poverka` (`poverka_id` int(11) NOT NULL, `poverka_row` text NOT NULL) ENGINE=InnoDB DEFAULT CHARSET=utf8 ROW_FORMAT=COMPRESSED;
poverka_id - порядковый номер поверки в ФГИС АРШИН
poverka_row - данные о поверке в формате json
Данные в колонке poverka_row хранятся в HEX виде и для получения рабочего массива json их необходимо преобразовать из HEX в строку, приведенной ниже функцией.
function hexToStr($hex){
$string='';
for ($i=0; $i < strlen($hex)-1; $i+=2){
$string .= chr(hexdec($hex[$i].$hex[$i+1]));
}
return $string;
}
$arr =json_decode($homepage, true);
В случае, если архив дамп MySQL имеет приставку _bin, для преобразования следует использовать стандартную функцию hex2bin(), которая преобразует шестнадцатеричные данные в двоичные.
В разработке
Статистика
Кол-во поверок - 200
Выдано извещений - 3
Кол-во периодических поверок - 97
Кол-во средств измерений - 39
Кол-во владельцев - 20
Усредненный год выпуска СИ - 2014
МПИ по поверкам - 4137 дн.
Приказы РСТ, где упоминается данный тип СИ
Наличие аналогов СИ: Системы дорожного контроля измерительные (СДК.Ам)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений ООО НИПВФ "Тензор"
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
15389-01 01.09.2011 |
Системы дорожного контроля, СДК.Ам ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
1 год | |
|
15389-13 11.07.2018 |
Системы дорожного контроля измерительные, СДК.Ам ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
ОТ |
1 год |
|
18983-99 01.05.2010 |
Весы стационарные автомобильные, ВС.А ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
1 год | |
|
24131-05 01.01.2011 |
Весы вагонные, ВВ ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
1 год | |
|
27480-04 |
Установка силовоспроизводящая, УСВ-10*2 ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
1 год | |
|
48544-11 |
Установка силовоспроизводящая, УСВ-10*2 ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
ОТ |
1 год |
|
56090-13 |
Система информационно-измерительная развески кузова электровоза, 2ЭС5 ООО НИПВФ "Тензор" (РОССИЯ г.Ростов-на-Дону) |
ОТ |
1 год |
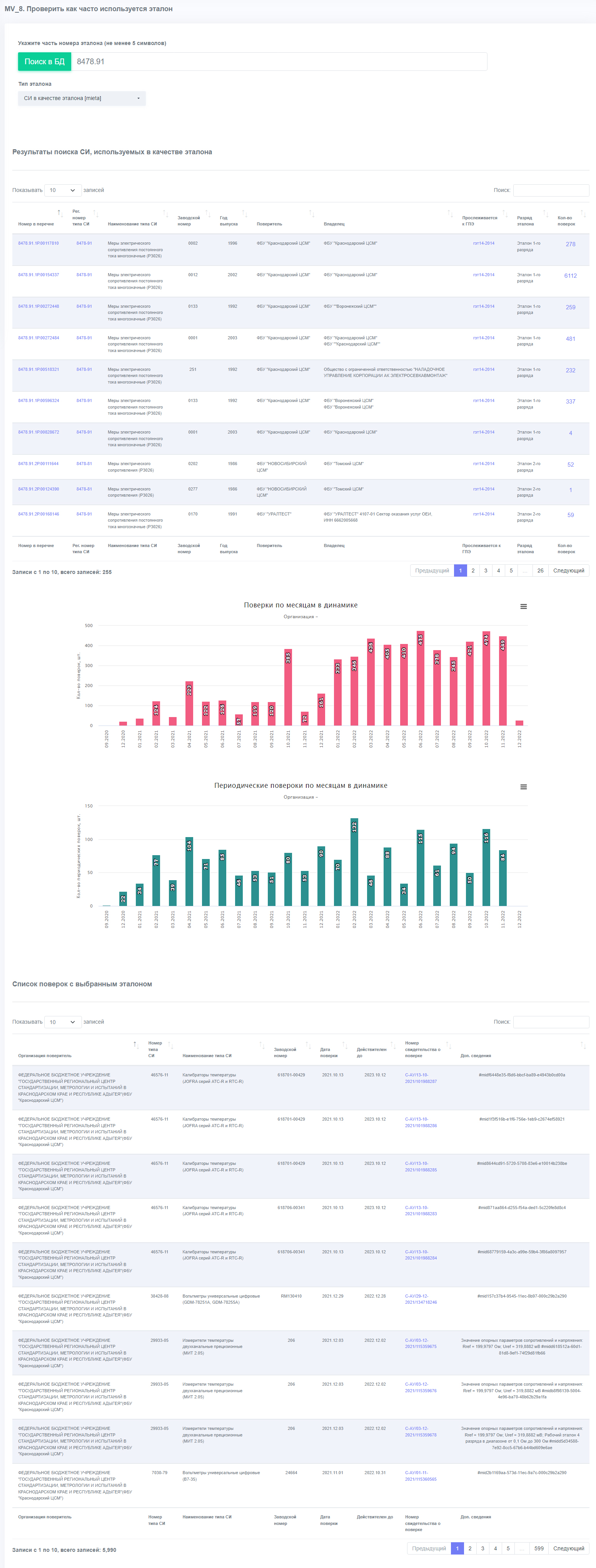
Отчет позволяет оценить частоту использования эталона в качестве средства поверки.
Анализируемый период: 01.01.2020 - н.в.
Анализ проводится по ГЭТ, аттестованным эталонам или СИ, применяемым в качестве эталонов.
При количестве поверок меньше 40 тыс., выводится список всех поверок.
Строятся графики поверок (всех и периодических) по месяцам.
Кто поверяет Системы дорожного контроля измерительные (СДК.Ам)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2024 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ФБУ "ПЕРМСКИЙ ЦСМ" (RA.RU.311363) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ООО "Тест-НН-сервис" (RA.RU.310629) | 3 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| ФБУ "ТЕСТ-С.-ПЕТЕРБУРГ" (RA.RU.311501) | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| ФБУ "ЦСМ РЕСПУБЛИКИ БАШКОРТОСТАН" (RA.RU.311406) | РСТ | 16 | 0 | 12 | 0 | 0 | 0 | 0 | ||
| ФБУ "СМОЛЕНСКИЙ ЦСМ" (RA.RU.311305) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "АСТРАХАНСКИЙ ЦСМ" (RA.RU.311475) | РСТ | 15 | 0 | 15 | 3 | 12 | 0 | 12 | ||
| ФБУ "ЧЕЛЯБИНСКИЙ ЦСМ" (RA.RU.311482) | РСТ | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "ЦСМ Татарстан" (RA.RU.311394) | РСТ | 6 | 0 | 4 | 0 | 4 | 0 | 4 | ||
| ФБУ "РОСТЕСТ-МОСКВА" (RA.RU.311341) | 4 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| ФБУ "СЕВЕРО-ОСЕТИНСКИЙ ЦСМ" (RA.RU.311509) | РСТ | 3 | 0 | 3 | 0 | 3 | 0 | 3 | ||
| ФБУ "ЦСМ Татарстан" (RA.RU.311394) | РСТ | 4 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ГОРЬК ДЦМ (RA.RU.312749) | 3 | 0 | 3 | 0 | 3 | 0 | 3 | |||
| ФБУ "ТЮМЕНСКИЙ ЦСМ" (RA.RU.311494) | РСТ | 2 | 0 | 1 | 0 | 0 | 0 | 0 | ||
| ФБУ "РОСТОВСКИЙ ЦСМ" (RA.RU.311306) | РСТ | 7 | 0 | 7 | 0 | 7 | 0 | 7 | ||
| ФБУ "ВОРОНЕЖСКИЙ ЦСМ" (RA.RU.311467) | РСТ | 3 | 0 | 3 | 0 | 0 | 0 | 0 | ||
| ФБУ "АМУРСКИЙ ЦСМ" (RA.RU.311498) | РСТ | 1 | 0 | 0 | 0 | 1 | 0 | 0 | ||
| ФБУ «Удмуртский ЦСМ» (RA.RU.311312) | РСТ | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "ПСКОВСКИЙ ЦСМ" (RA.RU.311507) | РСТ | 4 | 0 | 3 | 0 | 4 | 0 | 3 | ||
| ФБУ "Краснодарский ЦСМ" (RA.RU.311441) | РСТ | 2 | 0 | 2 | 0 | 2 | 0 | 2 | ||
| ФБУ «Пермский ЦСМ» (RA.RU.311363) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "ЧЕЛЯБИНСКИЙ ЦСМ" (RA.RU.311503) | РСТ | 3 | 0 | 0 | 0 | 3 | 0 | 0 | ||
| Коломенский филиал ФБУ «ЦСМ Московской области» (48) | РСТ | 4 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "ТАМБОВСКИЙ ЦСМ" (RA.RU.311407) | РСТ | 2 | 0 | 2 | 0 | 2 | 0 | 2 | ||
| ФБУ "КАЛИНИНГРАДСКИЙ ЦСМ" (RA.RU.311465) | РСТ | 34 | 8 | 0 | 34 | 0 | 34 | 0 | 34 | |
| ФБУ "РОСТЕСТ-МОСКВА" (RA.RU.311341) | РСТ | 2 | 1 | 0 | 0 | 1 | 1 | 0 | ||
| ФБУ «Алтайский ЦСМ» (RA.RU.311486) | РСТ | 8 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Воронежский ЦСМ» (RA.RU.311467) | РСТ | 13 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "РОСТОВСКИЙ ЦСМ" (РОСС RU.0001.310392) | РСТ | 7 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Великолукский ЦСМ» (RA.RU.311507) | РСТ | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "УДМУРТСКИЙ ЦСМ" (RA.RU.311312) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "ТЮМЕНСКИЙ ЦСМ" (RA.RU.311494) | РСТ | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "АЛТАЙСКИЙ ЦСМ" (RA.RU.311486) | РСТ | 4 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "КАЛИНИНГРАДСКИЙ ЦСМ" (RA.RU.311465) | РСТ | 8 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "ВОРОНЕЖСКИЙ ЦСМ" (RA.RU.311467) | РСТ | 6 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Тюменский ЦСМ» (RA.RU.311494) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Мурманский ЦСМ» (RA.RU.311466) | РСТ | 3 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Челябинский ЦСМ» (RA.RU.311503) | РСТ | 3 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Тамбовский ЦСМ» (RA.RU.311407) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ «Адыгейский ЦСМ» (45) | РСТ | 2 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| ФБУ "Краснодарский ЦСМ" (RA.RU.311441) | РСТ | 4 | 0 | 4 | 0 | 2 | 0 | 2 | ||
| ФБУ "ТЮМЕНСКИЙ ЦСМ" (RA.RU.311499) | РСТ | 3 | 0 | 3 | 0 | 1 | 0 | 1 | ||
| ФБУ "ПЕРМСКИЙ ЦСМ" (RA.RU.311363) | РСТ | 1 | 0 | 1 | 0 | 0 | 0 | 0 | ||
| ООО "ВЦ"ЮСТИР" (RA.RU.312170) | 3 | 3 | 0 | 0 | 3 | 3 | 0 |
Стоимость поверки Системы дорожного контроля измерительные (СДК.Ам)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|---|---|
|
ФБУ Воронежский ЦСМ Воронежская область |
6124 | 11432 |
|
Коломенский филиал ФБУ Ростест-Москва Московская область |
13206 | 11432 |
|
Клинский филиал ФБУ Ростест-Москва Московская область |
13206 | 11432 |
|
Сергиево-Посадский филиал ФБУ Ростест-Москва Московская область |
13206 | 11432 |
|
Серпуховский филиал ФБУ Ростест-Москва Московская область |
13206 | 11432 |
Программное обеспечение
ПО систем функционально делится на метрологически значимую и незначимую части. Метрологически значимая часть осуществляет обработку измерительной информации, сохранение результатов юстировки и измерений в базе данных. В состав метрологически значимой части ПО входят подпрограммы защиты результатов юстировки и измерительной информации, включая защиту при передаче информации в базу данных. Метрологически значимая часть ПО формирует управляющие сигналы для метрологически незначимой части ПО, которая осуществляет взаимодействие с сервисными устройствами.
Системы обеспечивают выполнение функций:
-
- автоматической установки нуля и слежения за нулем;
-
- определения направления движения ТС через ГПУ;
-
- автоматического формирования базы данных результатов измерений движущихся в потоке ТС с фиксацией даты и времени проезда.
По дополнительному заказу системы могут быть оснащены устройствами:
-
- видеонаблюдения и автоматической записи изображения ТС в момент взвешивания;
-
- идентификации взвешиваемых ТС;
-
- автоматического управления движением ТС с помощью светофоров и громкой связи.
При запуске ПО выполняется проверка целостности и подлинности метрологически значимой части. При нарушении целостности ПО, на монитор ПК выводится сообщение о характере нарушений и работа систем блокируется. Юстировка систем возможна только при наличии пароля и специального электронного ключа. Все изменения юстировочных коэффициентов сохраняются в электронном журнале событий.
Идентификационные данные метрологически значимой части ПО отображаются на мониторе ПК во время работы программы в главном окне на вкладке «Идентификационные признаки ПО Системы» и соответствуют таблице 1.
Таблица 1
|
Наименование ПО |
Идентификационное наименование ПО |
Номер версии |
Цифровой идентификатор ПО (контрольная сумма файла) |
Алгоритм вычисления цифрового идентификатора ПО |
|
МЗПО Etalon МЗПО СДК.Ам ПО Klient |
Etalon.dat Hash_MZPO.dat Klient car.exe |
не применяется не применяется V.1.0.3.XXX) |
DC0950C1 6FB02B50 CEBB97FC2) |
CRC32 CRC32 CRC32 |
|
Примечание: 1) XX - обозначение номера версии метрологически незначимой части ПО; 2) контрольная сумма файла Klient_car.exe может меняться при изменении версии метрологически незначимой части ПО. | ||||
Защита от несанкционированного доступа к системам осуществляется программными средствами, а также опломбированием соединительной коробки, к которой подключены датчики.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню «С» согласно МИ 3286-2010.
Знак поверки в виде оттиска поверительного клейма наносится на пломбу на соединительной коробке. Знак поверки в виде наклейки и записи, заверенной подписью поверителя с нанесением оттиска поверительного клейма, размещается в разделе сведений о проведении поверок руководства по эксплуатации.
Схема пломбировки приведена на Рисунке 2.

Рисунок 2 - Схема пломбировки систем
Знак утверждения типа
Знак утверждения типаЗнак утверждения типа наносится графическим способом на маркировочную табличку, расположенную в приборном отсеке грузоприёмного устройства и штемпелем на титульный лист руководства по эксплуатации.
Сведения о методиках измерений
Сведения о методиках (методах) измеренийИзложены в СДК.Ам-01.000.000 РЭ «Система дорожного контроля измерительная СДК.Ам. Руководство по эксплуатации» в разделе «Использование по назначению»
Нормативные и технические документы
Нормативные и технические документы, устанавливающие требования к Системам дорожного контроля измерительным СДК.АмГОСТ 8.021-05 «ГСИ. Государственная поверочная схема для средств измерения массы»,
ТУ 4274-005-49804336-2013 «Система дорожного контроля измерительная СДК.Ам. Технические условия».
Изготовитель
Общество с ограниченной ответственностью научно-исследовательская и производственно-внедренческая фирма «Тензор» (ООО НИПВФ «Тензор»),Адрес: 344058, Россия, г. Ростов-на-Дону, ул. 2-я Краснодарская, 129, тел./факс: 8 (863) 218 5580, 218 5591, 218 5583.
E-mail: tenzor@ms.math.rsu.ru.
Web: http://tenzor.math.rsu.ru.
Испытатель ГЦИ СИ ФГУП «ВНИИМС»
Аттестат аккредитации № 30004-08
Адрес: 119361, г. Москва, ул. Озерная, д. 46,
Тел.: (495) 437 5577, факс: (495) 437 5666,
E-mail: Office@vniims.ru,
www. vniims.ru
Заместитель Руководителя
Федерального агентства по техническому регулированию и метрологии
Принцип действия систем основан на преобразовании деформаций упругих элементов датчиков, возникающих под действием нагрузки на грузоприемную платформу в цифровой электрический сигнал, пропорциональный измеряемой массе. Далее измерительная информация поступает в персональный компьютер (далее - ПК). На основании этой информации программное обеспечение (далее - ПО) систем вычисляет для каждой оси значения осевых нагрузок, а также значение массы взвешиваемых транспортных средств (далее -ТС). Результаты измерений и вспомогательная информация выводятся на экран монитора и сохраняются в памяти ПК.
Системы состоят из грузоприемного устройства (далее - ГПУ), блока питания ГПУ и ПК, соединенных с ГПУ кабельной электрической линией связи.
ГПУ размещается на специально подготовленной площадке или на отдельной полосе движения участка дороги с твердым покрытием (далее - зона весового контроля). ГПУ состоит из рамы, грузоприемной платформы, четырех цифровых весоизмерительных тензо-резисторных датчиков ДВТ-10-Р (далее - датчики) с узлами встройки. Датчики имеют неразъемное соединение через соединительную коробку с блоком питания ГПУ и ПК. Блок питания ГПУ и ПК размещаются в отапливаемом помещении. Грузоприемная платформа подвешена внутри рамы на датчиках растяжения и может быть накрыта защитным металло-полимерным настилом, края которого закреплены на неподвижной раме.
Системы выпускаются в модификациях с обозначением «СДК.Ам- X-Y-Z», где:
«X» - определяет конструктивные особенности и принимает значения:
«1» - для ГПУ без защитного настила,
«2» - для ГПУ с металло-полимерным защитным настилом;
«Y» - определяет требования к зоне весового контроля и принимает значения:
«1» - ГПУ установлены на специальных площадках и предназначены для статического измерения осевых нагрузок и массы неподвижных ТС, а также для автоматического измерения массы ТС в движении с ограничением скорости до 6 км/ч;
«2» - ГПУ встроены непосредственно в дорогу и предназначены для автоматического измерения осевых нагрузок и массы ТС в движении с ограничением скорости до 90 км/ч.
«Z» - определяет наличие тех или иных сервисных устройств (по отдельному заказу), и может принимать значения и их сочетания:
«В» - наличие устройства видеонаблюдения и автоматической записи изображения ТС в момент взвешивания,
«И» - наличие устройства идентификации взвешиваемых ТС,
«У» - наличие устройства автоматического управления движением ТС.
Общий вид встроенного непосредственно в дорогу ГПУ системы с металло-полимерным защитным настилом показан на Рисунке 1.
Рисунок 1 - Общий вид встроенного непосредственно в дорогу ГПУ системы с металло-полимерным защитным настилом
Система 1 шт.
Устройство видеонаблюдения и автоматической записи изображения 1 шт.
ТС, шт. (по дополнительному заказу)
Устройство автоматической идентификации ТС, шт. (по дополнитель- 1 шт.
ному заказу)
Устройство автоматического управления движением ТС, шт. (по 1 шт.
дополнительному заказу)
Руководство по эксплуатации 1 экз.
Методика поверки 1 экз.
1 Режим статического взвешивания различных грузов, полностью размещаемых на грузоприёмной платформе
Пределы допускаемой абсолютной погрешности при поверке, т в интервалах нагрузок, т:
В эксплуатации пределы допускаемой абсолютной погрешности удваиваются .
2 Режим измерений осевых нагрузок неподвижных ТС
Наименьшая осевая нагрузка, т
Наибольшее число осей ТС (n), шт
Пределы допускаемой относительной погрешности измерений осевых нагрузок неподвижных ТС представлены в таблице 2
3 Режим измерений массы неподвижных ТС
Таблица 2
|
В интервалах осевых нагрузок (N), т |
Пределы допускаемой относительной погрешности измерений осевых нагрузок неподвижных ТС, % от измеренного значения для модификаций | |
|
СДК.Ам-Х-1 |
СДК.Ам-Х-2 | |
|
6 < N < 20 |
±1 |
±2 |
|
3 < N < 6 |
±2 |
±3 |
|
1,5 < N < 3 |
±4 |
±4 |
где: N - измеренное значение осевой нагрузки ТС
Наибольшее число осей ТС (n), шт
Наибольшая масса ТС, т........................................................................n
Пределы допускаемой относительной погрешности измерений массы неподвижных ТС в зависимости от расчетного значения относительной погрешности массы ТС представлены в таблице 3.
Таблица 3
|
В зависимости от расчетного значения относительной погрешности массы ТС (5м), % от измеренного значения |
Пределы допускаемой относительной погрешности измерений массы неподвижных ТС, % от измеренного значения |
|
5м < 1 |
±1 |
|
1 < 5м < 2 |
±2 |
|
2 < 5м < 3 |
±3 |
где: 5м - расчетное значение относительной погрешности массы ТС, автоматически вычисляемое ПО, в зависимости от значений измеренных осевых нагрузок ТС.
-
4 Режим измерений осевых нагрузок ТС в движении
Наибольшее число осей ТС (n), шт
-
4.1 Взвешивание ТС в движении со скоростью в интервале от 1 до 6 км/ч
-
4.1.1 В интервале осевых нагрузок (N), т.............................................1,5 < N < 3 пределы допускаемой относительной погрешности измерений осевых нагрузок в зависимости от коэффициента неравномерности движения представлены в таблице 5.
-
Таблица 5
|
В зависимости от коэффициента неравномерности движения (кнер), в условных единицах |
Пределы допусКаемой относительной погрешности измерений осевых нагрузоК ТС, % от измеренного значения |
|
Кнер < 4 |
±4 |
|
4 < Кнер < 8 |
±8 |
|
8 < Кнер < 16 |
±16 |
|
16 < кнер |
не нормируются |
где: кнер - здесь и далее расчетное значение коэффициента неравномерности движения, автоматически вычисляемое ПО, в зависимости от неравномерности движения и собственных колебаний ТС.
-
4.1.2 В интервале осевых нагрузок (N), т..............................................3 < N < 6
пределы допускаемой относительной погрешности измерений осевых нагрузок в зависимости от коэффициента неравномерности движения представлены в таблице 6.
Таблица 6
|
В зависимости от Коэффициента неравномерности движения (кнер), в условных единицах |
Пределы допусКаемой относительной погрешности измерений осевых нагрузоК ТС, % от измеренного значения для модифиКаций | |
|
СДК.Ам-Х-1 |
СДК.Ам-Х-2 | |
|
кнер < 2 |
±2 |
±3 |
|
2 <Кнер < 4 |
±4 |
±4 |
|
4 < Кнер < 8 |
±8 |
±8 |
|
8 < Кнер < 16 |
±16 |
±16 |
|
16 < Кнер |
не нормируется | |
-
4.1.3 В интервале осевых нагрузок (N), т..............................................6 < N < 20
пределы допускаемой относительной погрешности измерений осевых нагрузок в зависимости от коэффициента неравномерности движения представлены в таблице 7.
Таблица 7
|
В зависимости от Коэффициента неравномерности движения (Кнер), в условных единицах |
Пределы допусКаемой относительной погрешности измерений осевых нагрузоК ТС, % от измеренного значения для модифиКаций | |
|
СДК.Ам-Х-1 |
СДК.Ам-Х-2 | |
|
Кнер < 1 |
±1 |
±2 |
|
1 <Кнер < 2 |
±2 |
±3 |
|
2 <Кнер < 4 |
±4 |
±4 |
|
4 < Кнер < 8 |
±8 |
±8 |
|
8 < Кнер < 16 |
±16 |
±16 |
|
16 < Кнер |
не нормируется | |
4.2 Взвешивание ТС в движении со скоростью в интервале свыше 6 до 20 км/ч
Пределы допускаемой относительной погрешности измерений осевых нагрузок в интервале скоростей свыше 6 до 20 км/ч, в зависимости от коэффициента неравномерности движения представлены в таблице 8.
Таблица 8
|
В зависимости от коэффициента неравномерности движения (кнер), в условных единицах |
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС в интервале скоростей свыше 6 до 20 км/ч, % от измеренного значения ТС |
|
Кнер < 8 |
±8 |
|
8 < Кнер < 16 |
±16 |
|
16 < кнер |
не нормируется |
-
4.3 Взвешивание ТС в движении со скоростью в интервале свыше 20 до 90 км/ч
Пределы допускаемой относительной погрешности измерений осевых нагрузок ТС в движении в интервале скоростей свыше 20 до 90 км / ч при коэффициенте неравномерно -сти движения кнер < 16....................................................±16 % от измеренного значения.
При коэффициенте неравномерности движения кнер > 16 пределы допускаемой относительной погрешности измерений осевых нагрузок ТС не нормируются.
-
5 Режим измерений массы ТС в движении
Пределы допускаемой относительной погрешности измерения массы ТС в движении в зависимости от расчетного значения относительной погрешности массы ТС представлены в таблице 9
Таблица 9
|
В зависимости от расчетного значения относительной погрешности массы ТС (5м), % от измеренного значения |
Пределы допускаемой относительной погрешности измерений массы ТС в движении, % от измеренного значения |
|
5м < 1 |
±1 |
|
1 < 5м < 2 |
±2 |
|
2 < 5м < 3 |
±3 |
|
3 < 5м < 7 |
±7 |
|
7 < 5м < 10 |
±10 |
|
10 < 5м < 15 |
±15 |
где: 5м - расчетное значение относительной погрешности массы ТС, автоматически вычисляемое ПО, в зависимости от значений измеренных осевых нагрузок ТС с учётом их погрешностей.
-
6 Режим измерений расстояний между смежными осями ТС в движении со скоростью в интервале свыше 6 до 90 км/ч
Пределы допускаемой относительной погрешности измерений расстояний между смежными осями одиночного ТС, % от действительного значения ±4 %.
Для автопоездов и сочлененных ТС пределы допускаемой относительной погрешности измерений расстояний между последней осью тягача и первой осью прицепа (полуприцепа) возрастают на величину относительного люфта в сцепных устройствах.
Погрешность измерений расстояний между смежными осями ТС в движении со скоростью в интервале от 1 до 6 км/ч не нормируется.
-
7 Общие характеристики для всех модификаций и всех режимов работы систем Наибольшая скорость ТС при взвешивании, км/ч .............90
Наименьшая скорость ТС при взвешивании, км/ч ............1
Погрешность измерений скорости ТС не нормируется
Диапазон рабочих температур, 0С:
- для ГПУ и линии связи ...................................................... от минус 40 до плюс 50
- для ПК и периферийного оборудования .......................... от плюс 15 до плюс 30
Время готовности, мин ........................................................30
Электрическое питание от сети переменного тока:
- напряжение , В .................................................................... от 187 до 242
- частота, Гц.......................................................................... от 49 до 51
Размеры грузоприемной платформы, мм, не более ............4000х1000
Длина кабельной линии, м................................................... до 1000