
Номер по Госреестру СИ: 96274-25
96274-25 Сканеры лазерные мобильные
(OmniSLAM)
Назначение средства измерений:
Сканеры лазерные мобильные OmniSLAM (далее - сканеры), предназначены для измерений геометрических размеров инженерных объектов и сооружений по полученному в процессе сканирования массиву точек.


Внешний вид.
Сканеры лазерные мобильные
Рисунок № 1

Внешний вид.
Сканеры лазерные мобильные
Рисунок № 2

Внешний вид.
Сканеры лазерные мобильные
Рисунок № 3

Внешний вид.
Сканеры лазерные мобильные
Рисунок № 4

Внешний вид.
Сканеры лазерные мобильные
Рисунок № 5

Внешний вид.
Сканеры лазерные мобильные
Рисунок № 6

Внешний вид.
Сканеры лазерные мобильные
Рисунок № 7
Общие сведения
Дата публикации - 20.04.2026
Срок свидетельства - 29.08.2030
Номер записи - 192db877-951c-54f1-f942-60dae257231b
ID в реестре СИ - 1426592
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Методика поверки
Модификации СИ
OmniSLAM R8+ 120, OmniSlam R8+,
Производитель
Изготовитель - OmniSLAM Co., Ltd.
Страна - КИТАЙ
Населенный пункт - 102300, Beijing, MentougouDist, Lianshi Lake Rd, 98#
Уведомление о начале осуществления предпринимательской деятельности -
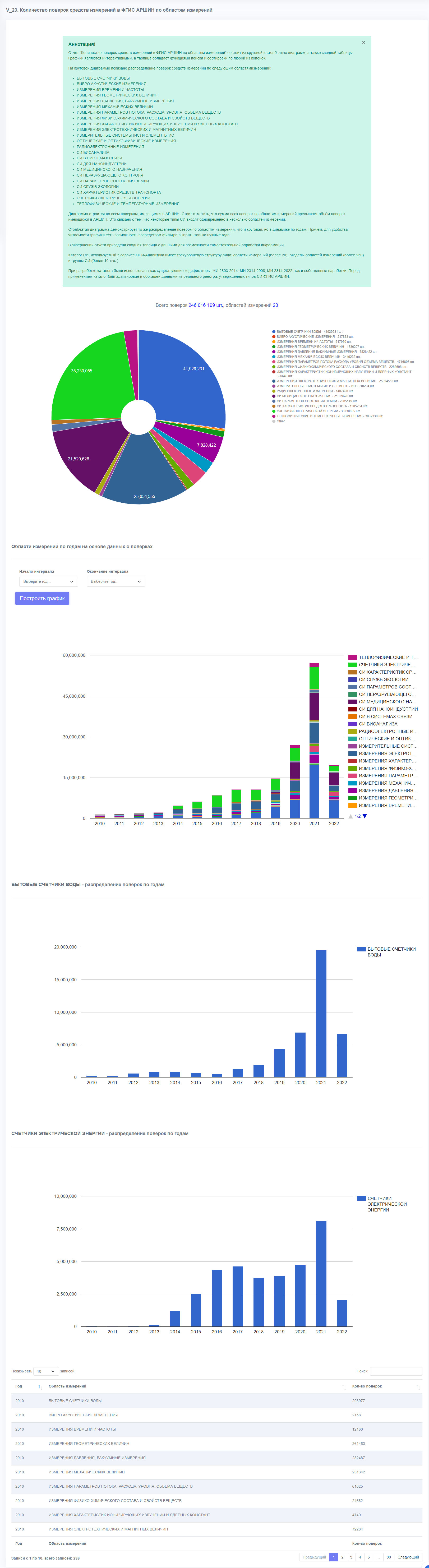
Отчет "Количество поверок средств измерений в ФГИС АРШИН по областям измерений" состоит из круговой и столбчатых диаграмм, а также сводной таблицы. Графики являются интерактивными, а таблица обладает функциями поиска и сортировки по любой из колонок.
На круговой диаграмме показано распределение поверок средств измеренйи по следующим областямизмерений:
- БЫТОВЫЕ СЧЕТЧИКИ ВОДЫ
- ВИБРО АКУСТИЧЕСКИЕ ИЗМЕРЕНИЯ
- ИЗМЕРЕНИЯ ВРЕМЕНИ И ЧАСТОТЫ
- ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН
- ИЗМЕРЕНИЯ ДАВЛЕНИЯ, ВАКУУМНЫЕ ИЗМЕРЕНИЯ
- ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН
- ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА, РАСХОДА, УРОВНЯ, ОБЪЕМА ВЕЩЕСТВ
- ИЗМЕРЕНИЯ ФИЗИКО-ХИМИЧЕСКОГО СОСТАВА И СВОЙСТВ ВЕЩЕСТВ
- ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ И ЯДЕРНЫХ КОНСТАНТ
- ИЗМЕРЕНИЯ ЭЛЕКТРОТЕХНИЧЕСКИХ И МАГНИТНЫХ ВЕЛИЧИН
- ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ (ИС) И ЭЛЕМЕНТЫ ИС
- ОПТИЧЕСКИЕ И ОПТИКО-ФИЗИЧЕСКИЕ ИЗМЕРЕНИЯ
- РАДИОЭЛЕКТРОННЫЕ ИЗМЕРЕНИЯ
- СИ БИОАНАЛИЗА
- СИ В СИСТЕМАХ СВЯЗИ
- СИ ДЛЯ НАНОИНДУСТРИИ
- СИ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ
- СИ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ
- СИ ПАРАМЕТРОВ СОСТОЯНИЯ ЗЕМЛИ
- СИ СЛУЖБ ЭКОЛОГИИ
- СИ ХАРАКТЕРИСТИК СРЕДСТВ ТРАНСПОРТА
- СЧЕТЧИКИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
- ТЕПЛОФИЗИЧЕСКИЕ И ТЕМПЕРАТУРНЫЕ ИЗМЕРЕНИЯ
Диаграмма строится по всем поверкам, имеющимся в АРШИН. Стоит отметить, что сумма всех поверок по областям измерений превышает объём поверок имеющихся в АРШИН. Это связано с тем, что некоторые типы СИ входят одновременно в несколько областей измерений.
Столбчатая диаграмма демонстрирует то же распределение поверок по областям измерений, что и круговая, но в динамике по годам. Причем, для удобства читаемости графика есть возможность посредством фильтра выбрать только нужные года.
В завершении отчета приведена сводная таблица с данными для возможности самостоятельной обработки информации.
Каталог СИ, используемый в сервисе ОЕИ-Аналитика имеет трехуровневую структуру вида: области измерений (более 20), разделы областей измерений (более 250) и группы СИ (более 10 тыс.).
При разработке каталога были использованы как существующие кодификаторы: МИ 2803-2014, МИ 2314-2006, МИ 2314-2022, так и собственные наработки. Перед применением каталог был адаптирован и обогащен данными из реального реестра, утвержденных типов СИ ФГИС АРШИН.
Статистика
Кол-во поверок - 10
Выдано извещений - 0
Кол-во периодических поверок - 0
Кол-во средств измерений - 2
Кол-во владельцев - 3
Усредненный год выпуска СИ - 0
МПИ по поверкам - 364 дн.
Приказы РСТ, где упоминается данный тип СИ
№1852 от 2025.08.29 ПРИКАЗ_Об утверждении типов средств измерений (14)
№1852 от 2025.08.29 Об утверждении типов средств измерений
Наличие аналогов СИ: Сканеры лазерные мобильные (OmniSLAM)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|

Кто поверяет Сканеры лазерные мобильные (OmniSLAM)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2026 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ООО "ЦИПСИ НАВГЕОТЕХ - ДИАГНОСТИКА" (РОСС RU.0001.310380) | 2 | 2 | 0 | 0 | 2 | 2 | 0 | |||
| ООО «ПРОММАШ ТЕСТ МЕТРОЛОГИЯ» (RA.RU.313740) | 8 | 8 | 0 | 0 | 5 | 5 | 0 |
Стоимость поверки Сканеры лазерные мобильные (OmniSLAM)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|
Программное обеспечение
Программное обеспечение (ПО) сканеров состоит из внутреннего и внешнего. Метрологически значимая часть содержится во внутреннем ПО (микропрограммное обеспечение, далее - МПО), размещаемом в энергонезависимой части памяти сканеров, запись которой осуществляется в процессе их производства. Внесение изменений в МПО при эксплуатации сканера функционально невозможно.
В комплектность сканеров включено внешнее ПО Capturer устанавливаемое на смартфон под управлением операционной системы Android (версия не ниже 12) и предназначенное для управления процессом сбора измерительной информации и ПО OmniSlam Mapper, устанавливаемое на персональный компьютер под управлением операционной системы Windows (версия не ниже 7) и предназначенное для обработки и хранения результатов измерений. ПО «GreenValley». ПО Capturer и ПО OmniSLAM Mapper не содержит метрологически значимой части.
Аппаратная и программная части, работая совместно, обеспечивают заявленные точности конечных результатов измерений.
Уровень защиты ПО «Средний» в соответствии с Р 50.2.077-2014.
Конструкция сканеров исключает возможность несанкционированного влияния на ПО и измерительную информацию.
Идентификационные данные программного обеспечения приведены в таблице 1.
|
Таблица 1 - Идентификационные данные ПО | |||
|
Идентификационные данные (признаки) |
Значение | ||
|
Идентификационное наименование ПО |
МПО |
Capturer |
OmniSLAM Mapper |
|
Номер версии ПО |
3.4.6 |
не ниже 1.0.8 |
не ниже 2.17.7 |
|
Цифровой идентификатор ПО |
- |
- |
- |
Знак утверждения типа
Знак утверждения типананосится типографским способом на титульный лист руководства по эксплуатации и наклейкой на корпус сканера.
Сведения о методиках измерений
Сведения о методиках (методах) измеренийприведены в главах «Использование Wi-Fi» и «Использование ПО Capturer» руководства по эксплуатации.
Нормативные и технические документы
Нормативные документы, устанавливающие требования к средству измеренийПриказ Федерального агентства по техническому регулированию и метрологии от 07 июня 2024 года № 1374 «Об утверждении Государственной поверочной схемы для координатно-временных средств измерений»
Локальная поверочная схема для сканеров лазерных мобильных OmniSLAM, утвержденная начальником ФГБУ «ГНМЦ» Минобороны России 19 февраля 2025 г.
Стандарт предприятия. «Сканеры лазерные мобильные OmniSLAM»
ПравообладательOmniSLAM Co., Ltd., Китай
Адрес: Китай, 102300, Beijing, Mentougou Dist, Lianshi Lake Rd, 98#
Телефон: +86-24-2296-1407
E-mail: support@omni-slam.com
Изготовитель
OmniSLAM Co., Ltd., КитайАдрес: Китай, 102300, Beijing, Mentougou Dist, Lianshi Lake Rd, 98# Телефон: +86-24-2296-1407
E-mail: support@omni-slam.com
Испытательный центр
Федеральное государственное бюджетное учреждение «Главный научный метрологический центр» Министерства обороны Российской Федерации(ФГБУ «ГНМЦ» Минобороны России)
Адрес: 141006, Московская обл., г. Мытищи, ул. Комарова, д. 13
Телефон: +7 (495) 583-99-23, факс: +7 (495) 583-99-48
Правообладатель
OmniSLAM Co., Ltd., КитайАдрес: Китай, 102300, Beijing, Mentougou Dist, Lianshi Lake Rd, 98#
Телефон: +86-24-2296-1407
E-mail: support@omni-slam.com
Принцип работы сканеров заключается в автоматическом определении пространственного положения точек окружающих объектов и дальнейшем построении трёхмерной модели сканируемых окружающих объектов в виде массива точек.
Конструктивно сканеры представляют собой модульную сканирующую систему, состоящую из блока управления и сканера, установленного на пластиковой опоре, вмещающего импульсный лазерный дальномер, электрические приводы и датчики углов поворота.
Принцип действия лазерного дальномера основан на измерении времени прохождения импульса лазерного излучения до объекта и обратно. Импульс лазерного излучения с помощью оптико-зеркальной поворотно-отклоняющей системы направляется на диффузную цель. Отраженное целью излучение принимается той же системой, усиливается и направляется на блок, где происходит измерение времени задержки излучаемого и принимаемого сигналов, на основании которого вычисляется расстояние до цели.
Управление сканером осуществляется при помощи кнопок, находящихся на корпусе прибора, с помощью контроллера, подключение производиться по радиоканалу сети Wi-Fi. Запись данных производится во внутреннюю память сканера.
К средствам измерений данного типа относятся сканеры лазерные мобильные OmniSLAM модификация R8+ 120, D8 120, T8 120, RM 120, RM+ 120, R8+ 300, D8 300, T8 300, RM 300, RM+ 300, отличающиеся между собой диапазоном измерений расстояний, пределами допускаемой абсолютной погрешности измерений углов, скоростью сканирования и числом точек на 1 м2.
Общий вид сканеров приведен на рисунке 1.
Заводской номер сканеров и имеет формат двенадцатизначного буквенно-цифрового номера:
-
- модификация R8+ 120 - R832PF YYYYYY,
-
- модификация R8+ 300 - R8MXPF YYYYYY,
-
- модификация D8 120 - D8320F YYYYYY,
-
- модификация D8 300 - D8MX0F YYYYYY,
-
- модификация T8 120 - T8320F YYYYYY,
-
- модификация T8 300 - T8MX0F YYYYYY,
-
- модификация RM 120 - RM320F YYYYYY,
-
- модификация RM 300 - RMMX0F YYYYYY,
-
- модификация RM+ 120 - RM32PF YYYYYY,
- модификация RM+ 300 - RMMXPF YYYYYY,
где «YYYYYY» - обозначение из арабских цифр.
Заводской номер сканеров наносится с помощью самоклеящейся пленки на заднюю панель сканера и обеспечивает возможность прочтения и сохранности номера в процессе эксплуатации средства измерений Места нанесения заводского номера и знака утверждения типа представлены на рисунке 2.
Нанесение знака поверки на средство измерений не предусмотрено.
а) модификации
R8+ 120, R8+ 300
в) модификации
RM+ 120, RM+ 300
б) модификации
RM 120, RM 300
Рисунок 1 - Общий вид сканеров лазерных мобильных OmniSLAM
д) модификации
T8 120, T8 300
Место нанесения знака утверждения типа
Место нанесения заводского номера
а) модификации R8+ 120, R8+ 300, RM 120, RM 300, RM+ 120, RM+ 300
г) модификации
D8 120, D8 300
д) модификации
T8 120, T8 300
Рисунок 2 - Места нанесения заводского номера и знака утверждения типа
В процессе эксплуатации сканеры не предусматривают внешних механических или электронных регулировок. Пломбирование крепёжных винтов корпуса сканеров не предусмотрено. Ограничение несанкционированного доступа к узлам сканеров обеспечено конструкцией корпуса, к узлам блока управления - конструкцией крепёжных винтов, которые могут быть сняты только при наличии специальных ключей.
аблица 4 -
|
Наименование |
Обозначение |
Количество, шт. (экз., компл.) |
|
Сканер |
OmniSLAM |
1 шт. |
|
Блок управления |
- |
1 шт. |
|
Накопитель данных |
- |
1 шт. |
|
Аккумуляторные батареи |
- |
2 шт. |
|
Устройство для быстрой замены аккумуляторных батарей |
1 шт. | |
|
Зарядное устройство |
1 шт. | |
|
Рюкзак |
1 шт. | |
|
Модуль ГНСС |
1 шт. | |
|
USB -накопитель |
1 шт. | |
|
Контроллер |
1 шт. | |
|
Площадка для измерения контрольных точек |
1 шт. | |
|
Плечевой ремень |
1 шт. | |
|
Комплект кабелей |
1 компл. | |
|
Транспортировочный кейс |
1 шт. | |
|
Программное обеспечение OmniSLAM Mapper |
1 шт. | |
|
Руководство по эксплуатации |
1 экз. |
аблица 2 - Метрологические характеристики
|
Наименование характеристики |
Значение |
|
Диапазон измерений расстояний, м: - модификации R8+ 120, D8 120, T8 120, RM 120, RM+ 120 |
от 0,5 до 120,0 |
|
- модификации R8+ 300, D8 300, T8 300, RM 300, RM+ 300 |
от 0,5 до 300,0 |
|
Пределы допускаемой абсолютной погрешности измерений расстояний, мм: - в поддиапазоне от 0,5 до 30 м включ. |
±2 |
|
- в поддиапазоне св. 30 до 60 м включ. |
±5 |
|
- в поддиапазоне св. 60 до 120 м включ. |
±10 |
|
- в поддиапазоне св. 120 до 300 м |
±20 |
|
Диапазон измерений углов |
от 0° до 360° |
|
Пределы допускаемой абсолютной погрешности измерений углов: - модификации R8+ 120, R8+ 300, D8 120, D8 300, T8 120; T8 300 |
±0,005° |
|
- модификации RM 120, RM 300, RM+ 120, RM+ 300 |
±0,015° |
аблица 3 - Технические характеристики
|
Наименование характеристики |
Значение |
|
Габаритные размеры (длина х ширина х высота), мм, не более: | |
|
- сканер | |
|
- модификации R8+ 120, R8+ 300 |
186 х 107 х 395 |
|
- модификации D8 120, D8 300 |
351 х 124 х 330 |
|
- модификации T8 120, T8 300 |
466 х 305 х 472 |
|
- модификации RM 120, RM 300, RM+ 120, RM+ 300 |
186 х 107 х 265 |
|
- управляющий блок | |
|
- модификации R8+ 120, R8+ 300, D8 120, D8 300, T8 120, T8 300 |
215 х 145 х 66 |
|
- модификации RM 120, RM 300, RM+ 120, RM+ 300 |
260 х 230 х 115 |
|
Масса, кг, не более: | |
|
- сканер | |
|
- модификации R8+ 120 |
2,1 |
|
- модификации R8+ 300 |
1,8 |
|
- модификации D8 120 |
4,3 |
|
-модификации D8 300 |
3,7 |
|
- модификации T8 120; T8 300 |
11,7 |
|
- модификации RM 120, RM+ 120 |
1,8 |
|
- модификации RM 300, RM +300 |
1,5 |
|
- управляющий блок | |
|
- модификации R8+ 120, R8+ 300, D8 120, D8 300, T8 120, T8 300 |
1,2 |
|
- модификации RM 120, RM 300, RM+ 120, RM+ 300 |
5,2 |
Продолжение таблицы 3
|
Наименование характеристики |
Значение |
|
Напряжение питания от источника постоянного тока, В |
от 12,0 до 16,8 |
|
Максимальная скорость сканирования, тысяч точек/с, не менее: - модификации R8+ 120, R8+ 300 |
640 |
|
- модификации D8 120, D8 300 |
1280 |
|
- модификации T8 120; T8 300 |
1920 |
|
- модификации RM 120, RM 300 |
640 |
|
- модификации RM+ 120; RM+ 300 |
640 |
|
Число точек1) на 1 м2, не менее: - модификации R8+ 120, R8+ 300 |
250000 |
|
- модификации D8 120, D8 300 |
250000 |
|
- модификации T8 120; T8 300 |
500000 |
|
- модификации RM 120; RM 300 |
10000 |
|
- модификации RM+ 120; RM+ 300 |
250000 |
|
Условия эксплуатации: - температура окружающего воздуха, °С |
от -25 до +65 |
|
Примечания: 1) при сканировании плоской поверхности, удаленной от сканера лазерного | |
|
мобильного OmniSLAM на 10 метров | |