
Номер по Госреестру СИ: 26474-10
26474-10 Комплексы автоматизированные контроля колесных пар вагонов
("PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ"))

Внешний вид.
Комплексы автоматизированные контроля колесных пар вагонов
Рисунок № 1
Общие сведения
Дата публикации -
Срок свидетельства - 12.11.2030
Номер записи -
ID в реестре СИ - 332664
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Модификации СИ
Поверено в соответствии с "Методикой поверки ДШЕК.411734.001 ИЗ", Комплекс автоматизированный контроля колесных пар вагонов "PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ"), Комплекс автоматизированный "Пеленг-Автомат", Комплекс автоматизированного котроля "Пеленг-Автомат", Комплекс автоматизированного контроля колесных пар вагонов ""PELENG-AUTOMAT"" (""ПЕЛЕНГ-АВТОМАТ"") ", Комплекс автоматизированного контроля колесных пар "Пеленг-Автомат", Комплекс автоматизированного контроля "Пеленг-Автомат", Комплекс автоматизированного контроля " Пеленг-Автомат", "PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ"),
Производитель
Изготовитель - Общество с ограниченной ответственностью «АЛТЕК» (ООО «АЛТЕК»)
Страна - РОССИЯ
Населенный пункт - г. Санкт-Петербург
Уведомление о начале осуществления предпринимательской деятельности -
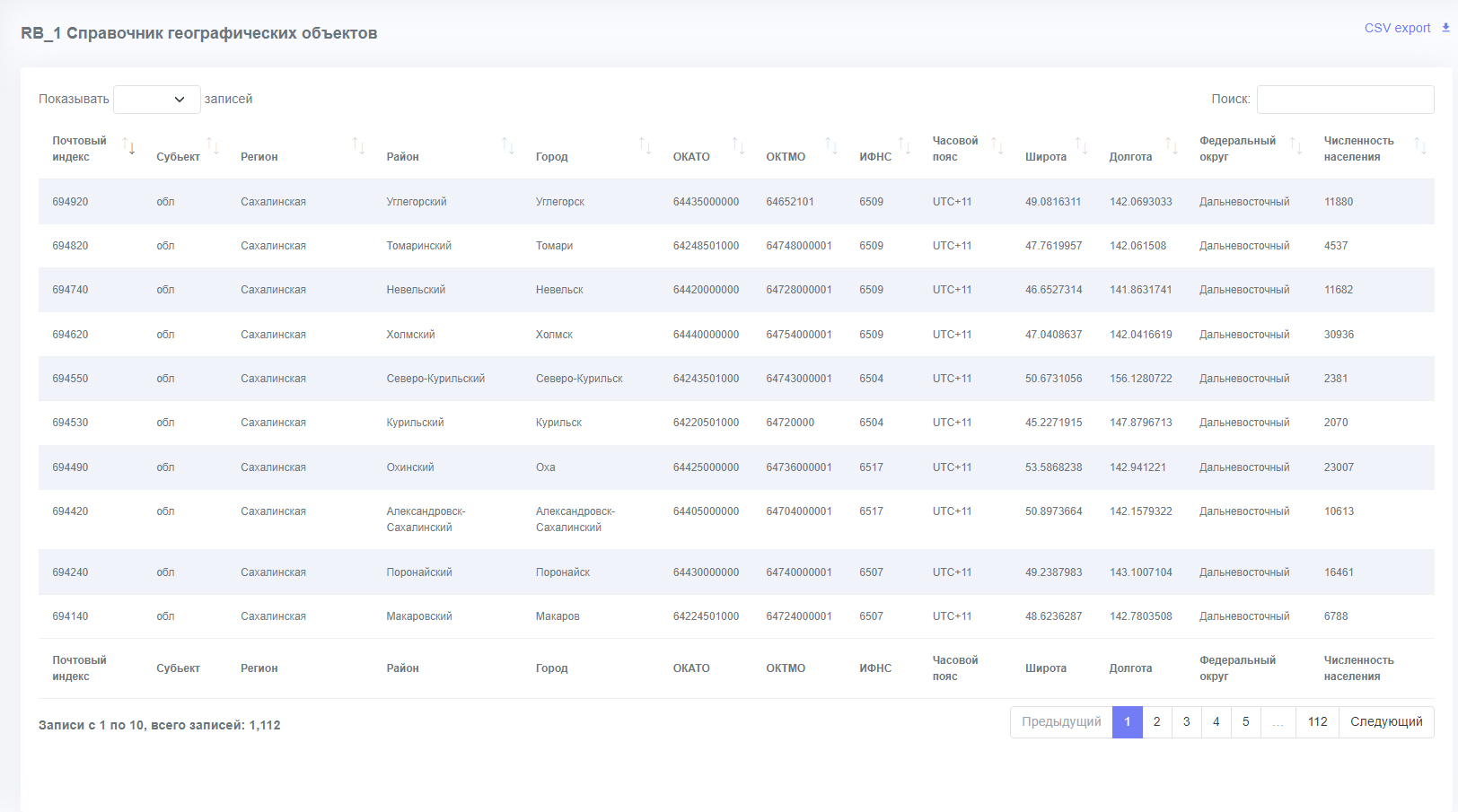
"Справочник географических объектов" представляет собой таблицу, состоящую из 13 колонок и 1112 строк. Справочник используется в проекте "ОЕИ Аналитика" для построения отчетов, связанных с географической привязкой исследуемого объекта и отображения его на карте. Кроме того, данный справочник позволяется осуществлять привязку друг к другу разрозненных таблиц разных баз данных, например, по городу или региону. В таблице присутствуют такие географические понятия, как: субъект РФ, регион, район, город, широта, долгота, федеральный округ и т.д.
Бесплатный
Статистика
Кол-во поверок - 115
Выдано извещений - 0
Кол-во периодических поверок - 61
Кол-во средств измерений - 13
Кол-во владельцев - 18
Усредненный год выпуска СИ - 2011
МПИ по поверкам - 364 дн.
Приказы РСТ, где упоминается данный тип СИ
№2169 от 2011.05.10 О внесении изменений и дополнений в приложение к приказу Федерального агентства по техническому регулированию и метрологии от 20 августа 2010 г. № 3108
№565 от 2024.02.29 ПРИКАЗ О внесении изменений в сведения об утвержденных типах СИ (5)
№882 от 2015.07.28 О продлении срока действия свидетельств об утверждении типа средств измерений
№463 от 2004.12.16 О предоставлении лицензии на осуществление деятельности по изготовлению и ремонту средств измерений ЗАО"АЛТЕК"
№1814 от 2020.11.11 о продлении срока действия утвержденных типов средств измерений
№2596 от 2024.10.31 Приказ об утверждении Программы национальной стандартизации на 2025 год
№624 от 2025.03.28 О внесении изменений в сведения об утвержденных типах средств измерений
Наличие аналогов СИ: Комплексы автоматизированные контроля колесных пар вагонов ("PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ"))
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений Общество с ограниченной ответственностью «АЛТЕК» (ООО «АЛТЕК»)
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
26474-10 12.11.2030 |
Комплексы автоматизированные контроля колесных пар вагонов, "PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ") Общество с ограниченной ответственностью «АЛТЕК» (ООО «АЛТЕК») (РОССИЯ г. Санкт-Петербург) |
ОТ |
1 год |
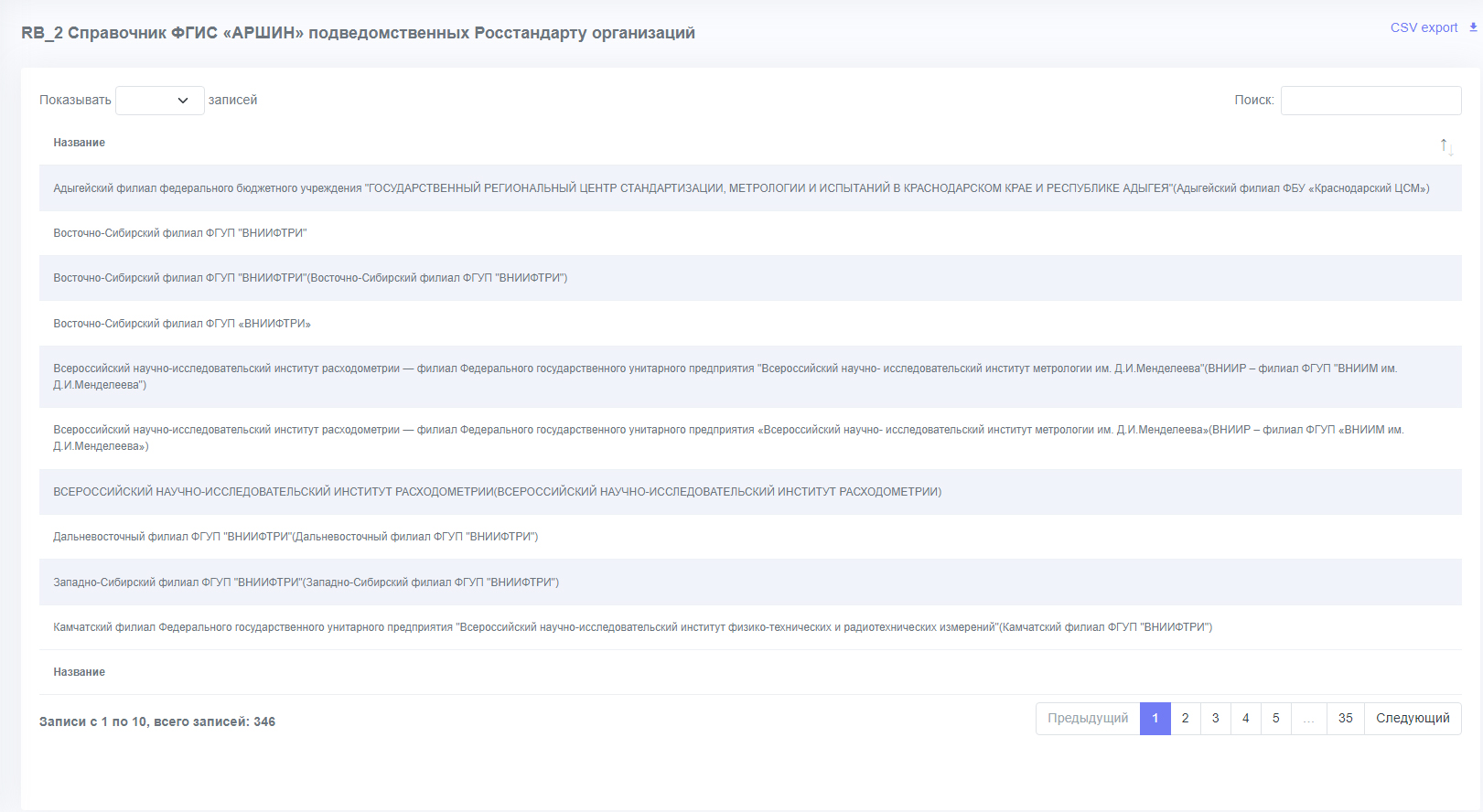
Справочник ФГИС «АРШИН» подведомственных Росстандарту организаций содержит список метрологических институтов и региональных метрологических организаций, подведомственных Росстандарту.
На текущий момент актуальный список "подведов" содержит чуть более 60 организаций, но ввиду того, что база ФГИС АРШИН по факту начала наполняться с 2010 года в ней скопилось множество задвоений наименований, различающихся написанием, дублей организаций, вызванных их объединением, реорганизацией и т.п.
Бесплатный
Кто поверяет Комплексы автоматизированные контроля колесных пар вагонов ("PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ"))
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2025 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ООО" АЛТЕК-ИНВЕСТ" (РОСС RU.0001.310044) | 115 | 10 | 7 | 61 | 0 | 3 | 0 | 3 |
Стоимость поверки Комплексы автоматизированные контроля колесных пар вагонов ("PELENG-AUTOMAT" ("ПЕЛЕНГ-АВТОМАТ"))
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|---|---|
|
ФБУ Тест-С.-Петербург Санкт-Петербург |
44940 | 44940 |
Программное обеспечение
Встроенное программное обеспечение (ПО), входящее в состав комплексов, выполняет функции обработки результатов измерений, изменения параметров контроля, создания и сохранения файлов с данными контроля.
Идентификационные данные ПО приведены в таблице 3.
Таблица 3.
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
«AUTOMAT» - для модификации С; «AUTOMATVT» - для модификаций С-В, С-ВД, С-ВДО. |
|
Номер версии (идентификационный номер) ПО |
версия 4.08 и выше - для модификации С; версия 0.1 - для модификаций С-В, С-ВД, С-ВДО. |
|
Цифровой идентификатор ПО |
- |
|
Другие идентификационные данные (если имеются) |
- |
Уровень защиты ПО соответствует типу «средний» согласно Р 50.2.077-2014.
Лист № 4 Всего листов 6
Знак утверждения типа
Сведения о методиках измерений
Сведения о методиках (методах) измеренийСведения о методиках (методах) измерений приведены в Руководстве по эксплуатации «Комплекс автоматизированный контроля колесных пар вагонов «PELENG-AUTOMAT» («ПЕЛЕНГ-АВТОМАТ»)», раздел 2 «Использование по назначению».
Нормативные и технические документы
Нормативные и технические документы, устанавливающие требования к комплексам автоматизированным контроля колесных пар вагонов «PELENG-AUTOMAT» («ПЕЛЕНГ-АВТОМАТ»)
ГОСТ Р 55809-2013 Контроль неразрушающий. Дефектоскопы ультразвуковые. Методы измерения основных параметров
ГОСТ 8.283-78 ГСИ. Дефектоскопы электромагнитные. Методы и средства поверки ДШЕК. 411734.001 ТУ Технические условия "Комплекс автоматизированный контроля колесных пар вагонов "PELENG-AUTOMAT" ("Пеленг-автомат").
Поверка
Поверкаосуществляется в соответствии с методикой поверки (приложение В к ДШЕК.411734.001 РЭ «Комплекс автоматизированный контроля колесных пар вагонов «PELENG-AUTOMAT» («Пеленг-автомат»). Руководство по эксплуатации»), утвержденной ФГУП «ВНИИОФИ» в августе 2010 г.
Основные средства поверки:
-
1. Осциллограф TDS-2012 (Госреестр №24018-02);
-
2. Генератор сигналов Г4-158 (Госреестр № 8777-13);
-
3. Комплекты мер моделей дефектов А-ВТ-12 (Госреестр № 53012-13);
-
4. Контрольные образцы №2 и №3 из комплекта контрольных образцов и
вспомогательных устройств КОУ-2 (Госреестр №6612-99)
Испытательный центр
Федеральное государственное унитарное предприятие «Всероссийский научноисследовательский институт оптико-физических измерений» (ФГУП "ВНИИОФИ").Адрес: 119361, г. Москва, ул. Озерная, 46
Тел. 437-33-56; факс 437-31-47
E-mail: vniiofi@vniiofi.ru, http://www.vniiofi.ru
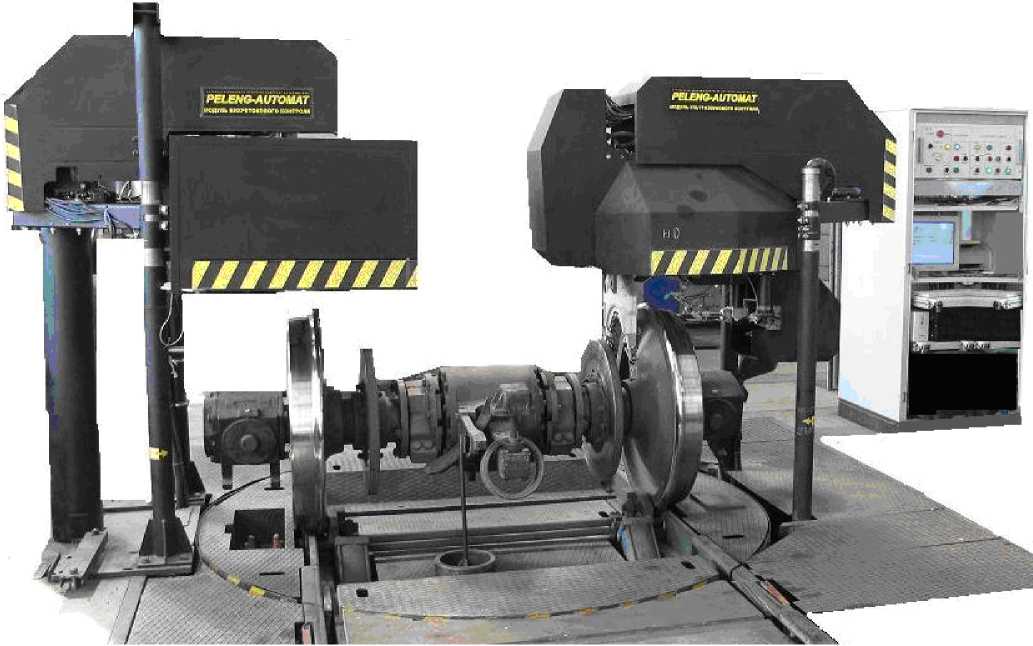
Принцип действия систем ультразвукового контроля основан на выявлении дефектов с использованием свойства ультразвуковых колебаний (УЗК) отражаться от неоднородностей материала контролируемого изделия. Ввод и прием УЗК осуществляется контактным способом при помощи пьезоэлектрических преобразователей (ПЭП). Возбуждение ПЭП, усиление принятых сигналов и обработка результатов контроля производится электронными модулями, размещенными в системном блоке промышленной ПЭВМ. ПЭП сгруппированы в виде нескольких конструктивных элементов - сканеров. Система фиксации сканеров обеспечивает перемещение в рабочее положение и надежное прилегание ПЭП к поверхностям контролируемых изделий (цилиндрическим поверхностям оси, поверхностям торца оси, поверхностям катания и обода колеса). Надежный акустический контакт ПЭП с проверяемым изделием обеспечивается также системой подачи, сбора и фильтрации контактной жидкости.
Принцип действия систем вихретокового контроля основан на анализе взаимодействия внешнего электромагнитного поля с электромагнитным полем вихревых токов, наводимых в объект контроля этим полем с использованием вихретоковых преобразователей (ВТП). ВТП сгруппированы в виде нескольких конструктивных элементов - сканеров. Возбуждение ВТП и обработка результатов контроля производится электронными модулями, размещенными в сканерах и системном блоке промышленной ПЭВМ. Системы подвеса и позиционирования сканеров обеспечивают их перемещение в рабочее положение и необходимый зазор между сканером и поверхностями контролируемого изделия (поверхностями катания и обода колеса, поверхностями диска, включая переходы диск - обод и диск - ступица, поверхностями торцов ступицы).
Фотография общего вида комплексов приведена на рисунке 1.
Рис.1 Общий вид комплексов
Перемещение и вращение КП, подвод и отвод сканеров, отображение параметров и результатов контроля на экране дисплея ПЭВМ, а так же их документирование на бумажных и электронных носителях производятся автоматически.
Модификации комплекса в зависимости от типа контролируемых КП и устройства для их вращения (в процессе контроля), разворота и скатывания из рабочей зоны (по окончании контроля), а также применяемой контактной жидкости (для ультразвукового контроля) приведены в таблице 1.
Таблица 1
|
Контролируемые КП |
Устройство вращения, разворота и скатывания КП |
Контактная жидкость |
Обозначение модификации комплекса * |
|
Без каких-либо насаженных элементов на среднюю часть оси |
Подъемно-поворотное |
Минеральное масло |
— |
|
Без каких-либо насаженных элементов на среднюю часть оси |
Подъемно-поворотное |
Водный раствор |
01 |
|
В том числе имеющие тормозные диски и(или) редуктор генератора в средней части оси |
Опорно-поворотное |
Водный раствор |
02 |
|
В том числе имеющие тормозные диски и(или) редуктор генератора в средней части оси |
Подъемно-поворотное (модернизированное по сравнению с модификацией 01) |
Водный раствор |
01М |
|
* Указывается в конце децимального номера на комплекс (например, ДШЕК.41 Для групповых документов (описывающих различные модификации компл документе) указанные обозначения могут отсутствовать. |
11734.001-01М). екса в одном | ||
Модификации комплекса в зависимости от применяемых методов контроля и контролируемых элементов КП приведены в таблице 2.
Таблица 2
|
Реализуемые методы контроля |
Контролируемые элементы КП |
Обозначение модификации комплекса * |
|
Ультразвуковой |
Контроль оси и колеса КП согласно РД 07.09-97 «Руководство по комплексному ультразвуковому контролю колесных пар вагонов» | |
|
Ультразвуковой |
Контроль оси и колеса КП согласно РД 07.09-97 и СТО РЖД 1.11.002-2008 «Контроль неразрушающий. Элементы колесных пар вагонов. Технические требования к ультразвуковому контролю» |
С |
|
Ультразвуковой и вихретоковый |
Ультразвуковой контроль оси и колеса КП согласно РД 07.0997 и СТО РЖД 1.11.002-2008; вихретоковый контроль колеса согласно РД 32.150-2000 «Вихретоковый метод неразрушающего контроля деталей вагонов» |
С-В |
|
Ультразвуковой и вихретоковый |
Ультразвуковой контроль оси и колеса КП согласно РД 07.0997 и СТО РЖД 1.11.002-2008; вихретоковый контроль колеса согласно РД 32.150-2000; неразрушающий контроль тормозных дисков |
С-ВД |
|
Ультразвуковой и вихретоковый |
Ультразвуковой контроль оси и колеса КП согласно РД 07.0997 и СТО РЖД 1.11.002-2008; вихретоковый контроль колеса согласно РД 32.150-2000; неразрушающий контроль тормозных дисков и вихретоковый контроль оси |
С-ВДО |
|
* Вместе с обозначением из таблицы 1 указывается в конце децимального номера на комплекс (например, ДШЕК.411734.001-01МС-В). Буквенное обозначение модификации может указываться после названия комплекса (например, «PELENG-AUTOMAT» (модификация МС-В) или «PELENG-AUTOMAT-МС-В»). Дефис в обозначении модификации может отсутствовать. | ||
Комплексы могут применяться на железнодорожном транспорте в качестве средства автоматизированного неразрушающего контроля элементов колесных пар (КП) вагонов с осями типов РУ1 и РУ1Ш, а также КП с коническими подшипниками кассетного типа при всех видах их освидетельствования и ремонта. Комплекс производит контроль КП в сборе.
в контрольном образце №2 из комплекта контрольных образцов и вспомогательных устройств КОУ-2
** определяется по мерам моделей дефектов из комплекта А-ВТ-12
приведены в таблице 4. Таблица 4.
|
Наименование параметра |
Значение параметра |
|
Система ультразвукового контроля | |
|
Номинальное значение частоты заполнения зондирующих |
0,40±0,04 |
|
импульсов и его отклонение, МГц |
1,25±0,13 2,50±0,25 5,00±0,50 |
|
Амплитуда зондирующих импульсов, В, не менее |
100 |
|
Длительность зондирующего импульса на уровне 0,5, мкс, не более: на частоте 0,4 МГц |
6,0 |
|
на частоте 1,25 МГц |
2,0 |
|
на частоте 2,5 МГц |
1,2 |
|
на частоте 5,0 МГц |
0,8 |
|
Номинальное значение условной чувствительности*, дБ, для резонаторов: П111-2,5 |
6 |
|
П121-2,5-40 |
20 |
|
Пределы допускаемой абсолютной погрешности измерения |
±(2+0,03-Y), где Y - |
|
глубины залегания дефекта, мм |
измеренное значение глубины залегания дефекта, мм |
|
Система вихретокового контроля | |
|
Частота возбуждения вихревых токов, кГц |
От 7 до 115 |
|
Режимы работы сканеров |
абсолютный, дифференциальный |
|
Чувствительность**: минимальная глубина выявляемых поверхностных дефектов, мм, для поверхностей с шероховатостью: Ra = 1,25 мкм |
0,5 |
|
Rz = 320 мкм |
3,0 |
|
Общие технические характеристики | |
|
Время установления рабочего режима в нормальных условиях, мин, не более |
5 |
|
Пределы допускаемой абсолютной погрешности измерения координаты расположения дефекта по длине (поверхности катания) | |
|
колеса, мм |
±10 |
|
Масса, кг, не более |
2000 |
|
Габаритные размеры, длина х ширина х высота, мм, не более |
4500 х 3500 х 3500 |
|
Средняя наработка на отказ комплекса с учетом технического обслуживания и комплекта ЗИП, ч, не менее |
1000 |
|
Средний срок службы комплекса с учетом наличия комплекта ЗИП, | |
|
лет, не менее |
10 |
|
Диапазон рабочих температур окружающего воздуха, °С |
От 1 до 35 |
* номинальное значение усиления при выявлении отверстия диаметром 6 мм на глубине 44 мм
Лист № 5 Всего листов 6