
№1068 от 01.08.2016
Приказ Федерального агентства по техническому регулированию и метрологии (Росстандарт)
# 1339
О внесении изменений в описание типа на системы измерений параметров автомобильных транспортных средств в движении UnicamWIM

МИНИСТЕРСТВО ПРОМЫШЛЕННОСТИ И ТОРГОВЛИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ (Госстандарт)
ПРИКАЗ01 августа 2016 г. 1068
Москва
ров
О внесении изменений в описание типа на системы измерений парамет) автомобильных транспортных средств в движении UnicamWIM
Во исполнение Административного регламента по предоставлению Федеральным агентством по техническому регулированию и метрологии государственной услуги по утверждению типа стандартных образцов или типа средств измерений, утверждённого приказом Министерства промышленности и торговли Российской Федерации от 25 июня 2013 г. № 970,
г.
зарегистрированного в Министерстве юстиции Российской Федерации 12 сентября 2013 г. № 29940 (далее — Административный регламент) и в связи с обращением фирмы САМЕА, spol. s г. о., Чешская Республика, от 6 июня 2016 г. № 52647-13 приказываю:
-
1. Внести изменения в описание типа на системы измерений параметров автомобильных транспортных средств в движении UnicamWIM, зарегистрированные в Федеральном информационном фонде по обеспечению единства измерений, с сохранением регистрационного номера 52647 изложив его в новой редакции согласно приложению к настоящему приказу.
-13,
-
2. Управлению метрологии (Р.А.Родин) оформить новое описание типа средства измерений.
-
3. Контроль за исполнением настоящего приказа возложить на заместителя Руководителя Федерального агентства по техническому
А.В .Абрамов
Приложение
к приказу Федерального агентства по техническому регулированию и метрологии от «01» августа 2016 г. № 1068
Изменения в описание типа на системы измерений параметров автомобильных транспортных средств в движении UnicamWIM
ОПИСАНИЕ ТИПА СРЕДСТВА ИЗМЕРЕНИЙ
Системы измерений параметров автомобильных транспортных средст движении типа UnicamWIM
Назначение средства измеренийСистемы измерений параметров автомобильных транспортных средств в движении типа UnicamWIM (далее - системы UnicamWIM) предназначены для измерений нагрузки на ось, на ось в группе осей, общей массы, габаритных размеров транспортного средства (далее - ТС), расстояний между осями ТС в автоматическом режиме.
Описание средства измеренийПринцип действия систем UnicamWIM основан на преобразовании сигналов пьезоэлектрических датчиков, возникающих при проезде ТС через измерительный участок систем UnicamWIM.
Системы UnicamWIM состоят из следующих основных и дополнительных модулей. Основные модули:
-
- весоизмерительный модуль (пьезоэлектрические датчики, блок обработки сигналов пьезоэлектрических датчиков);
-
- модуль обнаружения и измерения длины ТС (индукционные контуры, блок обработки сигналов индукционных контуров);
-
- промышленный компьютер с программным обеспечением UnicamWIM Driver;
-
- блок электропитания.
Дополнительные модули:
-
- оптическое лазерное устройство для определения высоты и ширины ТС;
-
- модуль позиционирования ТС на полосе движения;
-
- сервер системы UnicamWIM;
-
- модуль фото-видеофиксации и распознавания государственного регистрационного знака (далее - ГРЗ);
-
- термометр для измерения температуры дорожного полотна;
-
- датчик превышения высоты ТС;
-
- модуль синхронизации времени;
-
- роутер для сетевых подключений;
-
- GSM модем;
-
- Wi-Fi модуль;
-
- модуль подогрева/охлаждения шкафа управления;
-
- блок бесперебойного питания;
-
- информационное табло.
Рис. 1 - Общий вид системы UnicamWIM
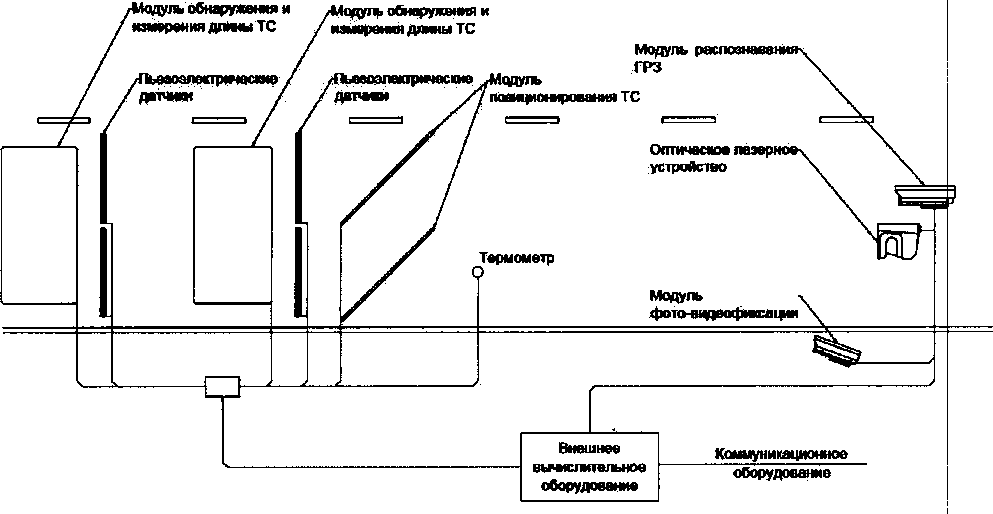
Рис.2 - Схематический вид системы UnicamWIM
Рис.4 - Место пломбировки в шкафу управления системы UnicamWIM
Принцип действия основных модулей:
-
- весоизмерительный модуль преобразует сигналы, возникающие при проезде ТС через пьезоэлектрические датчики, в аналоговые сигналы, параметры которых изменяются пропорционально нагрузке и времени прохождения ТС между датчик:; Пьезоэлектрические датчики монтируются в дорожное полотно перпендикулярно направлению движения ТС на определенном расстоянии друг от друга и позволяют определить массу, приходящуюся на каждую ось ТС, расстояние между осями количество осей ТС, скорость и ускорение ТС. На основе полученных результ; измерений производится расчет общей массы ТС;
:ами.
ТС, атов
-
- модуль обнаружения и измерений длины ТС преобразует сигналы, возникающие при проезде ТС через индукционные контуры, в аналоговые сигналы, параметры которых изменяются пропорционально длине и скорости ТС. Индукционные контуры монтируются в дорожное полотно перед пьезоэлектрическими датчиками и представляют собой незамкнутые медные провода в виде 4-х витковой петли. Индукционные контуры предназначены для обнаружения ТС в зоне контроля системы UnicamWIM, определения его длины.
Принцип действия дополнительных модулей:
при алы,
-
- оптическое лазерное устройство преобразует сигналы, возникающие непрерывном сканировании дорожного полотна и движущегося ТС, в аналоговые сигн; параметры которых изменяются пропорционально высоте и ширине ТС. Оптические лазерные устройства жестко закреплены на П- или Г-образной опорах и монтируются серединами полос. Оптические лазерные устройства позволяют измерить высоту и ширину движущегося ТС;
над
-
- в модуль фото-видеофиксации входят две видеокамеры: видеокамера фотовидеофиксации и распознавания ГРЗ (устанавливается над автомобильной дорогой, видеокамера оснащена инфракрасным прожектором) и обзорная видеокамера фотофиксации общего вида ТС в момент проезда через пьезоэлектрические датчики (устанавливается сбоку от автомобильной дороги или над дорогой). Изображения с видеокамер передаются на промышленный компьютер для дальнейшей обработки, анализа и передачи на сервер;
для
алы, :эм к при ляет
-
- модуль позиционирования ТС на полосе движения преобразует сигн; возникающие при проезде ТС через пьезополимерные кабели, расположенные под угл направлению проезда ТС, в аналоговые сигналы, параметры которых изменяются перестроении ТС или отклонении от полосы движения. Данный модуль позво. определить положение ТС на полосе движения, получить информацию о количестве колес на оси ТС.
Аналоговые сигналы с пьезоэлектрических датчиков и индукционных контуров поступают в блоки обработки сигналов, конструктивно объединенные в одном устройстве -блоке обработки и управления. Блок обработки и управления служит для сбора, анализа и преобразования аналоговых сигналов в цифровые сигналы об общей массе ТС, о массе, приходящейся на каждую ось ТС, на ось в группе осей, расстояниях между осями, длине ТС, дате и времени проезда, скорости, ускорении, количестве осей. Преобразованные цифровые сигналы передаются на промышленный компьютер.
Промышленный компьютер с установленным программным обеспечением обрабатывает, анализирует цифровые сигналы, полученные от блока обработка и управления, передает на сервер системы UnicamWIM информацию об измеренньх и рассчитанных параметрах ТС.
Элементы управления и обеспечения работы систем UnicamWIM устанавливаются в шкафу управления. Шкаф управления располагается рядом с местом установки пьезоэлектрических датчиков и индукционных контуров. Защита шкафа управления от несанкционированного доступа к блоку обработки и управления и промышленному компьютеру обеспечивается пломбой.
Сервер системы UnicamWIM состоит из компьютера и базы данных. Информация о параметрах ТС, полученных элементами системы UnicamWIM, хранится на сервере системы UnicamWIM. Доступ к базе данных осуществляется авторизированными пользователями.
Термометр для измерений температуры дорожного полотна используется для
|
температурной линеаризации и компенсации пьезоэлектрических датчиков в зависимое! актуальной температуры дороги. Время проезда ТС через зону контроля осуществляется с помощью синхронизаг сигналом GPS. Рабочий диапазон температур систем UnicamWIM обеспечивается внутри подогревом видеокамер, оптических лазерных устройств и шкафа управления. Системы осуществляют процедуры самодиагностики для выявления возмоя ошибок и подтверждения корректности измерений. Программное обеспечение Программное обеспечение (далее - ПО) системы UnicamWIM является встроенш полностью метрологически значимым. Идентификационным признаком ПО служит номер версии, который отображаете дисплее при включении системы UnicamWIM. Защита от несанкционированного доступа к ПО, настройкам и данным измерь обеспечивается авторизацией пользователя с помощью пароля. ПО не может быть изменено без нарушения пломбы и переключения переключате Программное обеспечение систем UnicamWIM (далее - ПО) предназначено для сС обработки, оценки, хранения и дальнейшей передачи информации, поступающей с мод систем UnicamWIM. ПО устанавливается на промышленный компьютер с операцио! системой Microsoft Windows XP/Vista/Seven/10. При включении компьютера запускается версия ПО отображается автоматически. Установка и техническое обслуживание осуществляется фирмой-изготовителем. Вход в ПО осуществляется авторизированн пользователями и защищен паролем. Результаты измерений защищены от преднамеренн непреднамеренных изменений с помощью контрольной суммы. Контрольная су создается индивидуально для каждого результата измерений. Таблица 1 - Идентификационные данные ПО систем UnicamWIM |
и от ИИ с [НИМ :ных ►IM и я на зний ля. ора, ляей 1НОЙ ПО, ПО ыми >1Х И мма | |
|
Идентификационные данные (признаки) |
Значение | |
|
Идентификационное наименование ПО |
Программное обеспечение UnicamWIM Driver 2.211.011 | |
|
Номер версии (идентификационный номер) ПО |
2.ХХХ.011 | |
|
Цифровой идентификатор ПО |
5556efd8addfff0blc43a5305f455 |
51е |
|
Алгоритм вычисление цифрового идентификатора ПО |
MD5,128 бит | |
|
Другие идентификационные данные, если имеются |
UnicamWIM Driver 2.211.011 | |
|
Уровень защиты ПО от непреднамеренных и преднамеренных воздействи соответствии с Р 50.2.077-2014 - «высокий». Метрологические и технические характеристики Метрологические и технические характеристики систем UnicamWIM приведены в таблице |
й в 2. | |
|
6 Таблица 2 | ||
|
Наименование характеристики |
Значение | |
|
Диапазон измерений общей массы ТС, кг |
otNx 1000 до N х 20 0( свыше, где 1 количество ТС |
0 и sF-эсей |
|
Максимальная масса, приходящаяся на ось ТС, кг |
35 000 | |
|
Минимальная масса, приходящаяся на ось ТС, кг |
1 000 | |
|
Дискретность отсчета измерений массы, приходящейся на ось, кг |
1 | |
|
Дискретность отсчета измерений общей массы ТС, кг |
1 | |
|
Пределы допускаемой относительной погрешности измерений общей массы ТС, % |
±5 | |
|
Пределы допускаемой относительной погрешности измерений массы, приходящейся на ось ТС, % |
±10 | |
|
Пределы допускаемой относительной погрешности измерений массы, приходящейся на ось в группе осей ТС, % |
±11 | |
|
Пределы допускаемой погрешности измерений расстояния между осями ТС, мм |
±30 | |
|
Пределы допускаемой абсолютной погрешности измерений габаритных размеров ТС, мм длины ширины высоты |
±600 ±100 ±60 | |
|
Размеры зоны контроля полосы движения, м: длина ширина |
6 4 | |
|
Диапазон скоростей, при которых обеспечивается точность измерения массы, км/ч |
от 20 до b |
10 |
|
Диапазон температур окружающей среды, при котором поддерживается рабочий диапазон температур шкафа управления, °C |
от минус до плюс 1 |
Ю 0 |
|
Рабочий диапазон температур пьезоэлектрических датчиков, °C |
от минусi до плюс $ |
ю 0 |
|
Рабочий диапазон температур дополнительных внешних модулей, °C |
от минус2 до плюс ( |
ю 0 |
|
Относительная влажность воздуха, % |
до 100 | |
|
Параметры электрического питания от сети переменного тока: напряжение, В частота, Гц потребляемая мощность, В -А, не более |
100-242 45-65 700 | |
|
Знак утверждения типа наносится типографским способом на титульный лист Руководства по эксплуатации. Комплектность средства измерений Комплектность средства измерений указана в таблице 3. | ||
Таблица 3
|
Наименование |
Количество | |
|
Система UnicamWIM |
1 шт. | |
|
Руководство по эксплуатации |
1 экз. | |
|
Методика поверки МП РТ 1781-2012 |
1 экз. |
осуществляется по документу МП РТ 1781 -2012 «Системы измерений параметров автомобильных транспортных средств в движении типа UnicamWIM. Методика поверки», утвержденному ГЦИ СИ ФБУ «Ростест-Москва» 06 июня 2012 г.
Основное поверочное оборудование:
-
- весы автомобильные для поосного взвешивания с максимальной нагрузкой M<lx не более 20 000 кг, с поверочным делением е не более 50 кг;
Max
-
- весы автомобильные для поколесного взвешивания с максимальной нагрузкой
не более 10 000 кг, с поверочным делением е не более 50 кг;
Max
-
- весы автомобильные неавтоматического действия с максимальной нагрузкой
не менее 40 000 кг, с поверочным делением е не более 50 кг;
-
- дальномеры лазерные с диапазоном измерений 0,20 м - 30,00 м и пределом допускаемой погрешности измерений ±5 мм или рулетки металлические с длиной шкалы 20 м и пределом допускаемой погрешности измерений ±5 мм;
-
- эталонные ТС: трехосные (четырехосные), многоосные (тягач с прицепом, трейлер).
Знак поверки наносится на свидетельство о поверке в виде оттиска поверитель ного клейма.
Сведения о методиках (методах) измеренийМетодика выполнения измерений изложена в Руководстве по эксплуатации.
Нормативные и технические документы, устанавливающие требования к системам измерений параметров автомобильных транспортных средств в движении типа UnicamWIM
-
1 ГОСТ Р 8.763-2011 «ГСИ. Государственная поверочная схема для средств измерений длины в диапазоне от Г10'9 до 50 м и длин волн в диапазоне от 0,2 до 50 мкм:>.
-
2 ГОСТ 8.021-2015 «ГСИ. Государственная поверочная схема для средств измергний
массы».
3 Приказ Министерства внутренних дел Российской Федерации от 08.11.20
2 г.
№1014 (в ред. Приказа МВД от 20.01.2015 г. №32) «Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений и обязательных метрологических требований к ним».
4 Техническая документация фирмы-изготовителя.
ИзготовительСАМЕА spol. s г.о., Чешская Республика
Корженского 25,621 00 Брно, TeL/fax: +420 541 228 874 e-mail: CAMEA@CAMEA.cz
Испытательный центрФедеральное бюджетное учреждение «Государственный региональный центр стандартизации, метрологии и испытаний в г. Москве» (ФБУ «Ростест-Москва») Адрес: 117418, г. Москва, Нахимовский проспект, д. 31
Тел: (495) 544-00-00
Аттестат аккредитации по проведению испытаний средств измерений в целях утверждения типа№ RA.RU.310639 выдан 16.04.2015 г.
Заместитель
Руководителя Федерального агентства по техническому регулированию и метрологии
М.п.
С.С. Голубев
2016 г.