
Номер по Госреестру СИ: 44895-10
44895-10 Установка гониометрическая
(ГУ-2)
Назначение средства измерений:
Установка гониометрическая ГУ-2 (далее - установка) предназначена для измерения плоского угла при проведении оценки основных параметров фотоэлектрических цифровых преобразователей угла (ФЦПУ) и может использоваться на этапе их разработки и серийного производства.
Область применения - ОАО «Авангард», подразделение предприятия, выпускающее фотоэлектрические цифровые преобразователи угла.

Общие сведения
Дата публикации - 08.05.2018
Срок свидетельства -
Номер записи - 133403
ID в реестре СИ - 355803
Тип производства - единичное
Описание типа
Поверка
Интервал между поверками по ОТ - 2 года
Наличие периодической поверки - Да
Модификации СИ
Нет модификации, нет данных, ГУ-2,
Производитель
Изготовитель - ГОУ ВПО "СПбГЭТУ"
Страна - РОССИЯ
Населенный пункт - г.С.-Петербург
Уведомление о начале осуществления предпринимательской деятельности - Да
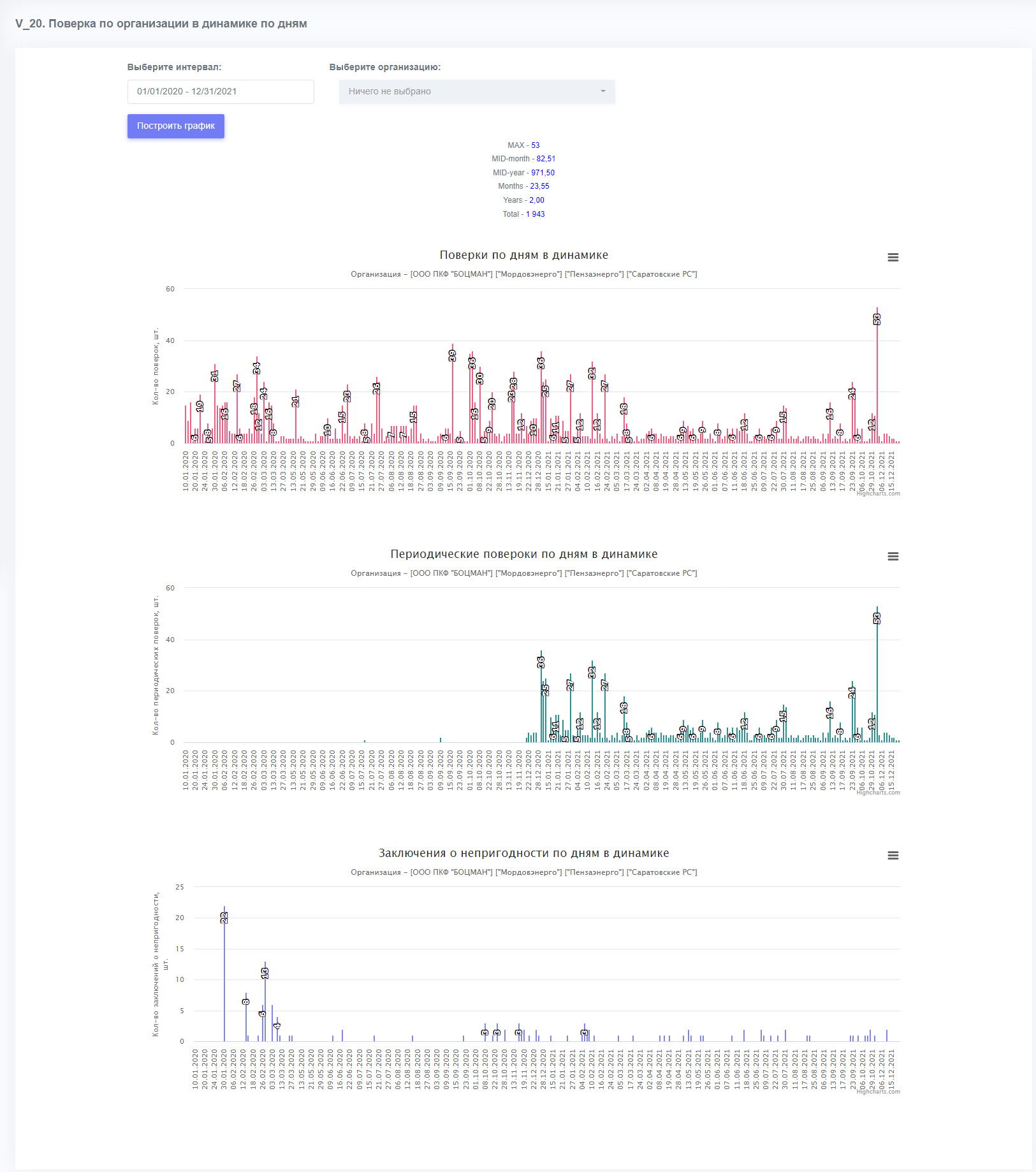
Отчет "V_20. Поверка по организации в динамике по дням" полезен для оценки объёмов количества поверок, проводимых аккредитованной организацией. Отчет строится в динамике по дням и представлен тремя графиками. Графики являются интерактивными с возможностью масштабирования и экспорта в сторонние программы. В зависимости от выбранного графика приводятся объёмы поверок (все поверки, периодические поверки, извещения о непригодности) по дням, конкретной организации или группы организаций.
Для справки в шапке отчета приводится усредненная статистика по запросу:
- максимальное количество поверок за день
- среднее количество поверок в месяц и год
- количество месяцев (в выбранном временном интервале)
- количество годов (в выбранном временном интервале)
- общее количество поверок за выбранный период
Для построения отчета необходимо предварительно сконфигурировать два параметра его отображения:
1- Выбрать интересующим временной интервал (в БД имеются данные начиная с 2010 г.)
2- Выбрать аккредитованную на поверку организацию (несколько организаций) из списка СИ (выпадающий список позволяет делать множественный выбор). Существование дубликатов организаций вызвано разницей в написании наименований и преобразовании форм собственности организаций за все время ведения федерального фонда. Для удобства выбора в скобках указано общее кол-во поверок в системе, приходящееся на конкретного поверителя.
Статистика
Кол-во поверок - 5
Выдано извещений - 0
Кол-во периодических поверок - 2
Кол-во средств измерений - 1
Кол-во владельцев - 2
Усредненный год выпуска СИ - 0
МПИ по поверкам - 730 дн.
Приказы РСТ, где упоминается данный тип СИ
№2586 от 2017.11.23 О внесении изменений в описание типа на систему автоматизированную информационно-измерительную коммерческого учета электроэнергии (АИИС КУЭ) МУП г. Череповца "Электросеть"
Наличие аналогов СИ: Установка гониометрическая (ГУ-2)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Все средства измерений ГОУ ВПО "СПбГЭТУ"
|
№ в реестре cрок св-ва |
Наименование СИ, обозначение, изголовитель | ОТ, МП | МПИ |
|---|---|---|---|
|
36360-07 |
Прибор для контроля параметров преобразователей угла, Нет данных ГОУ ВПО "СПбГЭТУ" (РОССИЯ г.С.-Петербург) |
1 год | |
|
44895-10 |
Установка гониометрическая, ГУ-2 ГОУ ВПО "СПбГЭТУ" (РОССИЯ г.С.-Петербург) |
ОТ |
2 года |
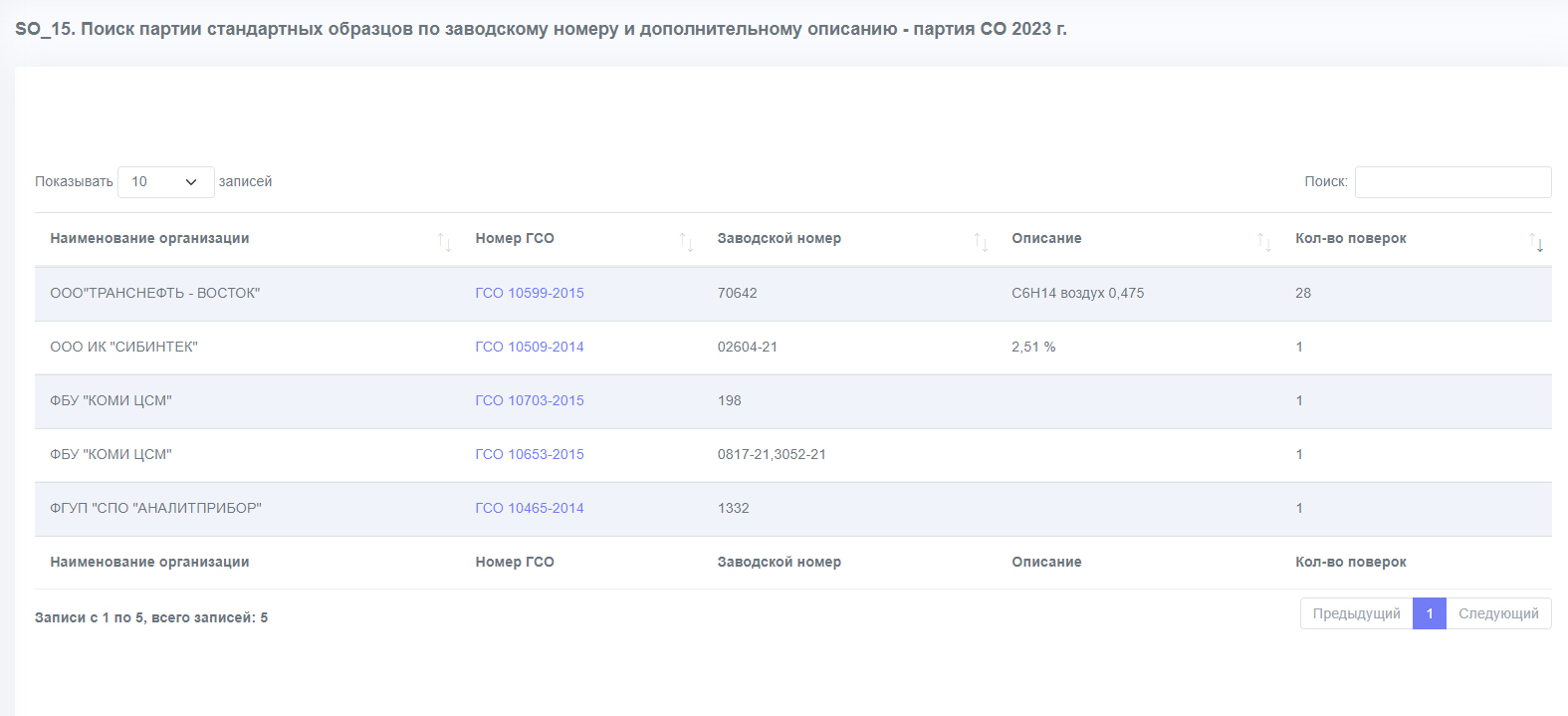
Ввиду большого размера таблиц БД, связанных с средствами поверки, отчет строится в 2 этапа.
На первом этапе выбирается год производства СО (он указывается поверителем при вводе данных о СО, как средстве поверки). Ввиду того, что при вводе данных поверители допускают огромное количество опечаток (присутствую СО с датой производства от 1000 до 3000 годов производства) ограничена возможность выбора года производства СО периодом с 2000 по текущий год.
После выбора года производства строится сводная таблица по СО, применяемым в качестве средства поверки. Отчет строится очень долго!!!! (при построении задействованы 2 таблицы с суммарным количеством записей на конец 2023 года 1.5млд строк, много полей текстовых)!!!! При формировании таблицы из нее исключаются СО для которых не был указан год производства и/или серийный номер.
Таблица содержит следующие сведения: наименование организации поверителя, номер ГСО, заводской номер ГСО, описание ГСО и кол-во поверок за выбранный год.
Кто поверяет Установка гониометрическая (ГУ-2)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2024 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ФГУП "ВНИИМ ИМ. Д.И.МЕНДЕЛЕЕВА" (RA.RU.311541) | РСТ | 2 | 0 | 2 | 0 | 2 | 0 | 2 | ||
| ФГУП "ВНИИМ им. Д.И. Менделеева" (RA.RU.311541) | 3 | 0 | 0 | 0 | 0 | 0 | 0 |
Стоимость поверки Установка гониометрическая (ГУ-2)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|
Знак утверждения типа
Знак утверждения типа наносится темной несмываемой краской на верхнюю поверхность корпуса оптико-механического блока ПИЖМ.408129.002 и на титульный лист ПИЖМ.401229.002РЭ типографским способом.
Сведения о методиках измерений
Нормативные и технические документы
ГОСТ 8.577-2002. ГСИ. Государственная поверочная схема для средств измерений линейных ускорений и плоского угла при угловом перемещении твердого тела.
ГОСТ Р 52931-2008. Приборы контроля и регулирования технологических процессов. Общие технические условия.
Технические условия ПИЖМ.401229.002 ТУ.
Поверка
Поверка установки проводится в соответствии с документом ПИЖМ.401229.002ПМ «Установка гониометрическая ГУ-2. Методика поверки», согласованным ГЦИ СИ ФГУП «ВНИИМ им. Д.И. Менделеева» 22.06.2010 г.
Перечень основных средств измерений, необходимых для поверки прибора:
1. Призма многогранная ПМ8. Диапазон угла 0 - 360°; дискретность 45°; 5 =0,2".
Межповерочный интервал - 2 года.
Установка реализует принцип динамического гониометра, заключающийся в сравнении двух угловых шкал (контролируемой и образцовой) при совместном вращении их физических носителей на общем валу по заданному закону движения.
Установка представляет собой электромеханический аппаратно-программный комплекс.
Функциональные узлы установки конструктивно размещены в следующих блоках: оптико-механическом блоке (I), электронном блоке (II), процессорном блоке (III) и рабочей станции (IV).
В оптико-механическом блоке I расположены:
оптико-механический блок МБ-2, в состав которого входят прецизионная ось вращения с подшипниками качения, электродвигатель, образцовый преобразователь угла (ОПУ), устройство позиционирования ФЦПУ.
Контролируемый ФЦПУ устанавливается на посадочную площадку устройства позиционирования, с использованием специальной методики совмещения осей ФЦПУ и установки. Ось ФЦПУ соединяется с осью установки прецизионной упругой компенсирующей муфтой, входящей в состав ЗИП и служащей для передачи движения ротору ФЦПУ с минимальной погрешностью в широком диапазоне скорости вращения.
В электронном блоке II расположены плата согласования сигналов, плата приёма информации, система управления движением СУ-2, плата контроля и блоки питания аппаратуры.
Система управления движением СУ-2 включает в себя сервоусилитель и программу управления.
Процессорный блок III содержит плату управления и обработки измерительной информации образцового преобразователя угла и плату внешнего интерфейса для формирования TTL импульсов, поступающих в электронный блок.
Рабочая станция IV представляет собой персональную ЭВМ, предназначенную для хранения и обработки данных, контроля и управления всеми системами гониометрической установки, и размещения головной программы.
Оптико-механический блок связан с электронным блоком через канал передачи информационных сигналов контролируемого и образцового преобразователей. Электронный блок связан с процессорным блоком через канал передачи данных и управления платой приёма информации. Рабочая станция связана с электронным блоком через интерфейсы RS232 (для связи с сервоусилителем) и USB (для обеспечения съема и управления режимом выдачи информации).
Установка работает следующим образом. При вращении оси оптико-механического блока в образцовом и контролируемом датчиках вырабатываются информационные и управляющие сигналы и коды, поступающие на вход электронного блока. Они с минимальной временной задержкой преобразуются и передаются в электронный блок, и обрабатываются там в зависимости от избранного протокола поверки. Для обеспечения необходимого закона движения задаваемые оператором параметры движения компилируются в программу управления движением, которая через СОМ порт передается в ОЗУ сервоусилителя. Одновременно с обработкой данных в рабочей станции вырабатывается сигнал управления вращением оси, передаваемый через сервоусилитель на двигатель.
|
№ п/ п |
Наименование конструкторского документа |
Обозначение |
Количество |
|
1 |
2 |
3 |
4 |
|
1 |
Оптико-механический блок |
ПИЖМ.408129.002 |
1 |
|
2 |
Электронный блок |
ЭБ-2 |
1 |
|
3 |
Процессорный блок |
А200 |
1 |
|
4 |
Рабочая станция |
Q8300/W7P/4Gb/DWDRW/ 9500СТ/кл+мышь/ 23”LGW2343T-PF |
1 |
|
5 |
Комплект ЗИП |
ПИЖМ.442613.036 |
1 |
|
6 |
Руководство по эксплуатации |
ПИЖМ.401229.002РЭ |
1 |
|
7 |
Формуляр |
ПИЖМ.401229.002ФО |
1 |
|
8 |
Методика выполнения измерений |
ПИЖМ.401229.002МИ |
1 |
|
9 |
Руководство оператора |
ПИЖМ.401229.002-01 34 |
1 |
|
10 |
Методика поверки |
ПИЖМ.401229.002ПМ |
1 |
Диапазон углового перемещения, градус Пределы допускаемой абсолютной погрешности в диапазоне скорости вращения,*
0-360

0,03 - 5
0,03 - 1,25 об/с
1,25-5об/с
Диапазон скорости вращения, об/с
Направление вращения
Питание
Напряжение, В
Частота, Гц
Потребляемая мощность, Вт, не более Габаритные размеры, ШхГхВ, мм:
-
- Оптико-механический блок
-
- Электронный блок
-
- Процессорный блок
-
- Рабочая станция
Масса, кг, не более
Условия эксплуатации
-
- температура, °C
-
- влажность, %
-
- атмосферное давление, кПа
Срок службы, лет
Реверсивное
220±22 50±0,5 600
300x300x340
470x460x150
225x190x45
190x430x480
70
20±2
до 80
84... 106,7
8