
Номер по Госреестру СИ: 84333-22
84333-22 Системы измерений вибрационные балансировочные
(ВИБРОЛАБ)
Назначение средства измерений:
Системы измерений вибрационные балансировочные ВИБРОЛАБ (далее по тексту -системы) предназначены для измерения частоты вращения ротора и амплитуды виброперемещения в составе балансировочных станков с целью последующего расчета значения и угла дисбаланса, корректирующей массы.

Внешний вид.
Системы измерений вибрационные балансировочные
Рисунок № 1
Общие сведения
Дата публикации - 13.01.2022
Срок свидетельства - 11.01.2027
Номер записи - 185723
ID в реестре СИ - 1395775
Тип производства - серийное
Описание типа
Поверка
Интервал между поверками по ОТ - 1 год
Наличие периодической поверки - Да
Методика поверки
Модификации СИ
ВИБРОЛАБ,
Производитель
Изготовитель - ООО "Энсет"
Страна - РОССИЯ
Населенный пункт - г. Ростов-на-Дону
Уведомление о начале осуществления предпринимательской деятельности - Да
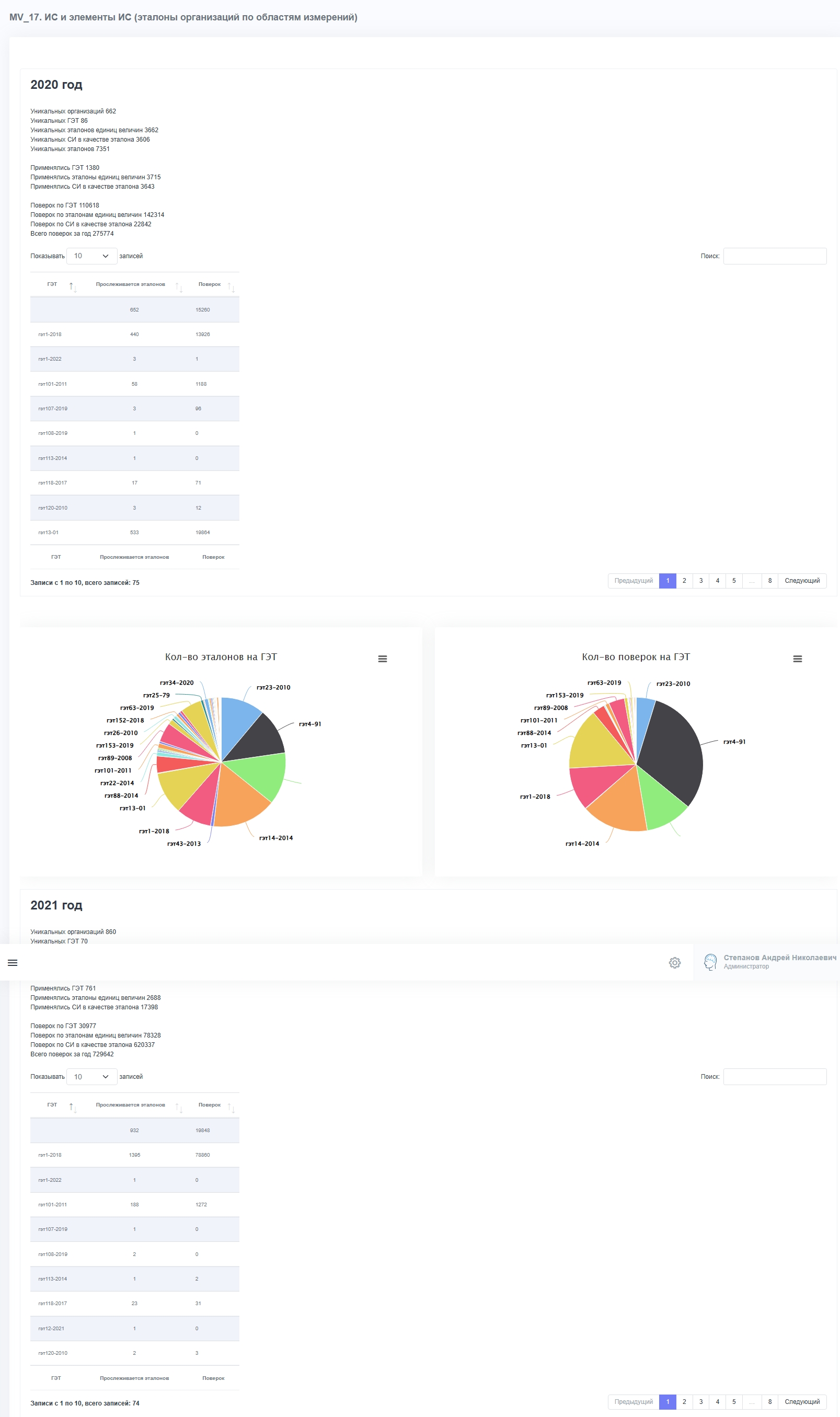
Отчет представляет собой таблицу с перечнем эталонов организаций, применяемых при поверке измерительных систем (ИС) и элементов ИС. По каждому эталону приведена подробная статистика поверок средств измерений (СИ) по годам. В качестве эталона могут выступать:
- Государственные первичные эталоны (ГЭТ);
- Эталоны единиц величин, закрепленные за метрологическими службами;
- Средства измерений, официально используемые в качестве эталонов.
Основная цель отчета — обеспечить прозрачность применения эталонов в поверочной деятельности и дать представление о загрузке и активности организаций, владеющих эталонами.
Визуальное представление данных реализовано в виде:
- Интерактивных таблиц для каждого календарного года (с 2020 по 2027);
- Графиков и диаграмм, построенных с помощью библиотеки Highcharts;
- Возможности сортировки, фильтрации и поиска по таблицам (DataTables);
- Экспорта данных в различных форматах;
- Отображения географической информации с использованием Яндекс.Карт (при необходимости);
- Адаптивной верстки для корректного отображения на разных устройствах.
Отчет входит в специализированный аналитический раздел информационной системы и позволяет:
- Оценивать динамику использования эталонов по годам;
- Сравнивать организации по активности применения эталонной базы;
- Формировать представление о роли конкретных эталонов в обеспечении единства измерений;
- Использовать полученные данные для анализа устойчивости метрологической инфраструктуры.
Инструменты визуализации включают поддержку светлой и тёмной темы, загрузку дополнительных скриптов аналитики, а также удобную навигацию по смежным отчетам через боковое меню. Отчет адаптирован для использования как техническими специалистами, так и руководителями организаций.
Статистика
Кол-во поверок - 35
Выдано извещений - 0
Кол-во периодических поверок - 6
Кол-во средств измерений - 16
Кол-во владельцев - 2
Усредненный год выпуска СИ - 2022
МПИ по поверкам - 364 дн.
Приказы РСТ, где упоминается данный тип СИ
№20 от 2022.01.11 ПРИКАЗ_Об утверждении типов средств измерений (15)
Наличие аналогов СИ: Системы измерений вибрационные балансировочные (ВИБРОЛАБ)
| ИМПОРТНОЕ СИ № в реестре, наименование СИ, обозначение, изголовитель |
ОТЕЧЕСТВЕННЫЙ АНАЛОГ № в реестре, наименование СИ, обозначение, изголовитель |
|---|
Отчет предоставляет агрегированные данные о стоимости поверки средств измерений по регионам, городам и организациям. Данные о стоимости поверки берутся из открытых источников и периодически обновляются. В базе содержится более 700 тыс. записей.
В качестве поисковой фразы могут быть указаны: номер типа СИ из реестра АРШИНа, часть наименования типа СИ, город или наименование организации. Фраза должна состоять минимум из 5 символов.
Кто поверяет Системы измерений вибрационные балансировочные (ВИБРОЛАБ)
| Наименование организации | Cтатус | Поверенные модификации | Кол-во поверок | Поверок в 2025 году | Первичных поверок | Периодических поверок | Извещений | Для юриков | Для юриков первичные | Для юриков периодические |
|---|---|---|---|---|---|---|---|---|---|---|
| ФБУ "РОСТОВСКИЙ ЦСМ" (RA.RU.311306) | РСТ | 35 | 14 | 29 | 6 | 0 | 35 | 29 | 6 |
Стоимость поверки Системы измерений вибрационные балансировочные (ВИБРОЛАБ)
| Организация, регион | Стоимость, руб | Средняя стоимость |
|---|---|---|
|
ФБУ Тюменский ЦСМ Тюменская область |
25334 | 25334 |
Программное обеспечение
Метрологически значимая часть программного обеспечения (ПО) систем находится в микропроцессоре, прошивка которого осуществляется при изготовлении систем. Наличие механической защиты не позволяет считать или модифицировать ПО в процессе эксплуатации.
Конструкция СИ исключает возможность несанкционированного влияния на ПО СИ и измерительную информацию.
Таблица 1 - Идентификационные данные ПО
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
ВИБРОЛАБ-ПО |
|
Номер версии (идентификационный номер) ПО |
4.х |
|
Цифровой идентификатор ПО |
не используется |
|
Алгоритм вычисления цифрового идентификатора ПО |
- |
|
Другие идентификационные данные (если имеются) |
- |
где х - число, идентифицирующее номер версии метрологически незначимой части ПО.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню
«высокий» согласно Р 50.2.077-2014.
Знак утверждения типа
Знак утверждения типананосится полиграфическим методом на наклейку, размещаемую на задней панели основного блока и в паспорт методом печати.
Сведения о методиках измерений
Сведения о методиках (методах) измерений
приведены в разделе 1.4 руководства по эксплуатации.
Нормативные и технические документы
Нормативные и технические документы, устанавливающие требования к системам измерений вибрационным балансировочным ВИБРОЛАБ
Приказ Росстандарта от 27.12.2018 № 2772 г. «Об утверждении государственной поверочной схемы для средств измерений виброперемещения, виброскорости, виброускорения и углового ускорения».
Приказ Росстандарта от 31.07.2018 № 1621 г. «Об утверждении государственной поверочной схемы для средств измерений для средств измерений времени и частоты».
ТУ 26.51-001-38447005-2021 «Системы измерений вибрационные балансировочные ВИБРОЛАБ. Технические условия»
Изготовитель
Общество с ограниченной ответственностью «Энсет» (ООО «Энсет»)ИНН 6165177184
Адрес: 344003, г. Ростов-на-Дону, пл. Гагарина, 1
Тел. (863) 221-50-05, 273-84-62
Факс (863) 273-84-62
Е-mail: info@enset.ru
Испытательный центр
Федеральное бюджетное учреждение «Государственный региональный центр стандартизации, метрологии и испытаний в Ростовской области» (ФБУ «Ростовский ЦСМ»)Адрес: 344000, Ростовская область, г. Ростов-на-Дону, пр. Соколова, 58/173
Телефон: (863)290-44-88, факс: (863)291-08-02
E-mail: info@rostcsm.ru
Принцип действия систем основан на преобразовании вибрации опорных стоек балансировочного станка в электрический сигнал, пропорциональный виброперемещению, с дальнейшим расчетом в автоматическом режиме значения и угла дисбаланса для балансируемого изделия (ротора), а также значения корректирующей массы. Значение и угол дисбаланса рассчитывается с помощью определяемых коэффициентов влияния используя относительные значения электрического сигнала.
Измерение амплитуды виброперемещения осуществляется при помощи пьезоэлектрических и (или) емкостных акселерометров, устанавливаемых по одному в каждой из опорных стоек балансировочного станка. В качестве акселерометров могут применяться пьезоэлектрические или емкостные акселерометры. В дальнейшем в основном блоке происходит цифровая фильтрация сигналов, поступающих от первичных преобразователей, определение частоты вращения ротора и текущего углового положения балансируемого ротора, а также выделение амплитуд и фаз колебаний на частоте вращения ротора и расчет значений дисбалансов и их углов в каждой плоскости ротора по методу векторных коэффициентов влияния, расчет корректирующих масс.
Дополнительно системы имеют функцию измерения частоты вращения ротора при помощи лазерного отметчика оборотов, а также функцию контроля угла поворота ротора с использованием датчика угла (инкрементальный энкодер), устанавливаемого на привод балансировочного станка.
Конструктивно системы представляют из себя основной блок, в едином корпусе которого размещены дисплей, измерительный модуль, блок питания, материнская плата, вентилятор и жесткий диск, а также устанавливаемые на опорах и приводе станка первичные преобразователи, соединяемые с основным блоком линиями связи.
Системы применяются для целей динамической и статической балансировки жестких, квазижестких и гибких роторов в составе дорезонансных или зарезонансных вертикальных или горизонтальных балансировочных станков с одной, двумя, тремя или четырьмя плоскостями коррекции. Системы позволяют определять начальный дисбаланс перед балансировкой и остаточный дисбаланс после проведения балансировки с оцениванием его соответствия установленным допустимым значениям.
Системы содержат базу данных балансируемых изделий с набором установленных исходных параметров. Имеется возможность пополнения базы данных, а также ручного ввода исходных параметров для расчета дисбаланса и корректирующих масс.
В качестве устройства ввода и вывода информации используется жидкокристаллический сенсорный дисплей, расположенный на передней части основного блока.
Результаты измерений и расчетов сохраняются в энергонезависимой памяти (жестком диске) и могут быть переданы по интерфейсам USB (записаны на съемный носитель) и по локальной компьютерной сети (протокол TCP-IP). Также системы поддерживают вывод информации о проведенной балансировке на принтеры, подключаемые по USB и TCP-IP.
Системы имеют возможность управления частотно-регулируемыми приводами асинхронных электродвигателей по протоколу Modbus. По устойчивости к воздействию температуры и влажности окружающего воздуха системы соответствуют условиям УХЛ 4.2 по ГОСТ 15150-69.
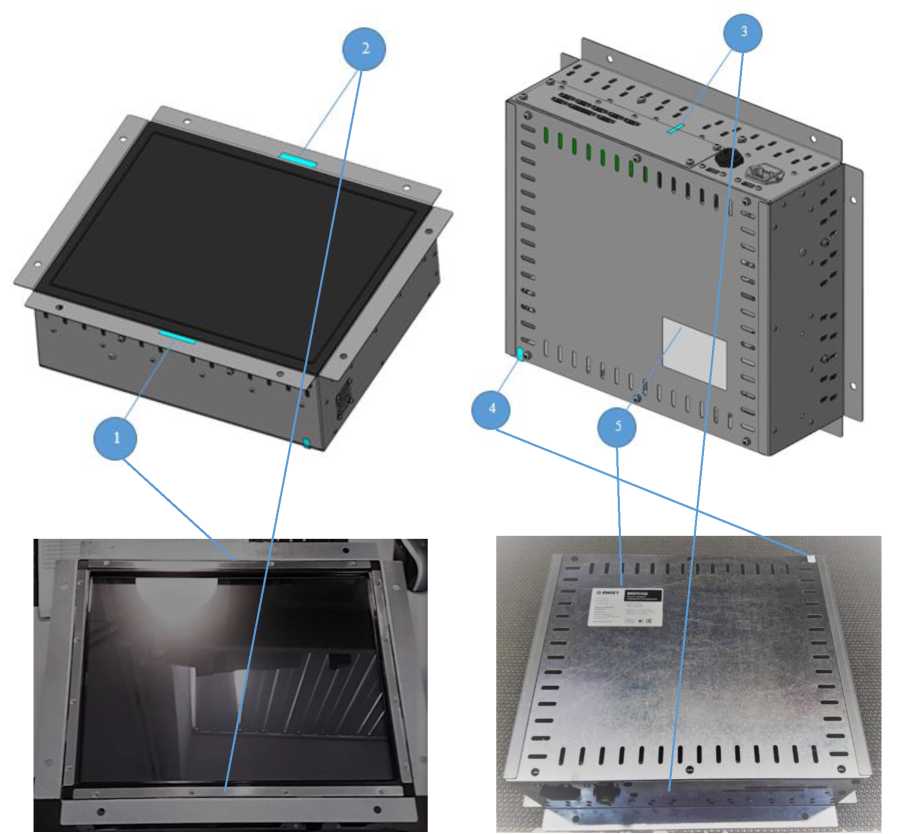
Корпус систем пломбируется легкоразрушаемыми наклейками в 4 местах.
1- 4 - легкоразрушаемые наклейки; 5 - наклейка производителя. Рисунок 1 - Общий вид систем и места опломбирования
Таблица 2 - Метрологические характеристики
|
Наименование параметра |
Значение |
|
Количество измерительных каналов виброперемещения, шт. |
от 1 до 4* |
|
Диапазон измерений амплитуды виброперемещения, мкм |
от 1 до 1000 включ. |
|
Пределы допускаемой относительной погрешности измерений амплитуды виброперемещения, % |
±3 |
|
Диапазон измерений частоты вращения ротора, об/мин |
от 180 до 30000 включ. |
|
Пределы допускаемой погрешности измерений частоты вращения ротора, об/мин, где n - число оборотов ротора |
±(1+0,0025-n) |
|
Диапазон определяемых дисбалансов, гмм/кг (мкм) |
от 0,1 до 500 включ. |
|
Диапазон рабочих частот, Гц |
от 3 до 500 включ. |
* - количество измерительных каналов виброперемещения определяется при заказе
Таблица 3 - Основные технические характеристики
|
Наименование параметра |
Значение |
|
Потребляемая мощность, В^А, не более |
100 |
|
Параметры электропитания от сети переменного тока: - напряжение переменного тока, В |
от 187 до 242 |
|
- частота, Гц |
от 49 до 51 |
|
Диапазон рабочих температур, °С |
от +10 до +35 |
|
Габаритные размеры основного блока, мм, не более - высота |
370 |
|
- ширина |
125 |
|
- длина |
430 |
|
Масса основного блока, кг, не более |
15 |
|
Средняя наработка на отказ, ч, не менее |
40000 |
|
Средний срок службы, лет |
25 |